КАТЕГОРИИ:
АстрономияБиологияГеографияДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРиторикаСоциологияСпортСтроительствоТехнологияФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Пример применения
 В резервуаре высотой 100 см и квадратным сечением по внутреннему контуру 12 х 12 см2 налита вода (рис.1.6). Уровень воды может изменяться за счёт её пополнения от питающей магистрали через электромагнитный клапан (ЭМК) и уменьшения от естественного расхода. Уровень измеряется датчиком ИСУ – 100 И [], который преобразует его в токовый сигнал 0…20 mA и передаёт на вход контроллера для выработки управляющих воздействий на ЭМК.
В резервуаре высотой 100 см и квадратным сечением по внутреннему контуру 12 х 12 см2 налита вода (рис.1.6). Уровень воды может изменяться за счёт её пополнения от питающей магистрали через электромагнитный клапан (ЭМК) и уменьшения от естественного расхода. Уровень измеряется датчиком ИСУ – 100 И [], который преобразует его в токовый сигнал 0…20 mA и передаёт на вход контроллера для выработки управляющих воздействий на ЭМК.
Задание:определить уставки на срабатывание и отключение ЭМК, обеспечивающие включение клапана при опускании уровня до отметки L1, при которой остаток воды в ёмкости равен 3 литрам; после этого долить в неё 7 литров и выключить ЭМК с возможностью непрерывного повторения цикла.
Решение.
· Токовый сигнал преобразуется в масштаб напряжения по схеме рис. 1.4.
Рис. 1.6
Ÿ Прибор измеряет уровень, а не объём, т.е. его показания будут одинаковы при любых значениях поперечного сечения резервуара. Но так как по условиям задачи требуется управлять объёмом, нужно рассчитать, на каких значениях уровня объём будет равен 3 и 10 литрам. Так как L = V / S, а S = 12 ∙ 12 = 144 см2 , получено:
L1 =3000 см3 / 144 см2 = 20,83 см,
L2 = 10000 см3 / 144 см2 = 69,4 см.
Если учесть, что при уровне 100 см входной сигнал контроллера равен 10 B, а это в свою очередь соответствует числу 255. то можно перевести найденные значения L1 и L2 в их целочисленные эквиваленты:
X1 = 255 ∙ L1 / 100 = 53; X2 = 255 ∙ L2 / 100 = 177.
Найденные значения X1 и X2 при составлении программы необходимо ввести в качестве порогов срабатывания блоков, контролирующих изменение уровня воды в резервуаре.
Ÿ Программно реализовать тот вариант управления, который рассмотрен в данном примере, можно по-разному.
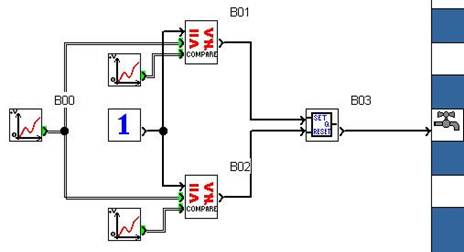 На рис.1.7 показывается, как это можно сделать на основе совместного использования R-S триггера (блок B03) и компараторов. В этом случае триггер выполняет функции переключаемого элемента (самоблокирующегося реле), а моменты переключения определяются по результатам сравнения текущих значений уровня с введёнными в компараторы пороговыми значениями X1 и X2.
На рис.1.7 показывается, как это можно сделать на основе совместного использования R-S триггера (блок B03) и компараторов. В этом случае триггер выполняет функции переключаемого элемента (самоблокирующегося реле), а моменты переключения определяются по результатам сравнения текущих значений уровня с введёнными в компараторы пороговыми значениями X1 и X2.
Рис. 1.7
Программы для рассматриваемого примера составлены в среде Zelio Soft 2 применительно к контроллерам Telemechaniqueфирмы Schneider Electric. Три левых блока на рис. 1.7 – это устройства аналогового ввода. На схеме показано их обобщённое отображение 
Через B00 текущие значения уровня подаются на верхние аналоговые входы компараторов B01 и B02 для сравнения с пороговыми значениями на переключение. Пороги сравнения поданы на нижние входы, а условия переключения заданы как < = (не больше) для B 01 и > = (не меньше) для B 02. Управление ЭМК осуществляется R – S триггером B 03 с установкой от B 01 и сбросом от B 02.
Графику отображения блоков ввода и вывода есть возможность изменить, если есть желание более точно выразить в ней функциональное назначение сигнала. Это показано на рисунке 1.9, где блоки установки уровней сравнения изображены потенциометрами, а информационный вход – датчиком. Выходной блок также отображён максимально приближенным к управляемому клапану.
 |
Рис. 1.8
Работу программы можно пояснить временной диаграммой (рис. 1.8). Пока уровень воды меньше 3 литров (числовой эквивалент в дискретах X1 =53), на выходе B 01 выделяется сигнал ON, устанавливающий выход триггера B 03 в ON, обеспечивая тем самым включение клапана. Как только уровень превысит значение 53, блок B 01 переключится на OFF, но B 03 «запомнит» своё прежнее состояние и ЭМК будет поддерживаться в открытом состоянии. Только когда уровень превысит отметку X2 =177, переключившийся в ON компаратор B 02 сбросит B 03 в OFF и ЭМК выключится. Заполнение резервуара водой прекратится до того момента времени, пока уровень не окажется ниже порога X1 =53.
 |
а
б
Рис. 1.9
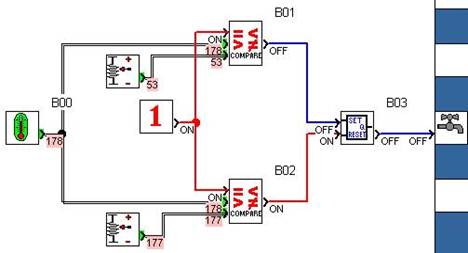
На рис. 1.9, а и б показано исполнение программы для двух промежуточных этапов управления, соответствующих моментам времени t1 и t2на временных диаграммах. Численные значения пороговых и текущих значений уровня даны комментариями к блокам программы.
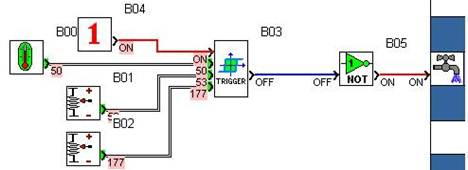
Эту же задачу можно решить иначе, если вместо совместного использования компараторов и R–S триггера применить триггер Шмитта. Он способен совместить функции переключения по заданным пороговым значениям и самоблокирующегося реле для запоминания ранее достигнутого состояния.
По правилам описания блока верхнее пороговое значение X2 = 177 присваивается переключению в ON, а нижнее X1 =53 – возвращению его в OFF. При такой работе блока переключение ЭМК было бы обратным тому, каким оно должно быть (он включался бы тогда, когда его надо было выключать), поэтому между триггером и ЭМК включен инвертор. Рисунок 1.10 иллюстрирует выполнение сформулированной задачи управления.
 |
а
 |
б
Рис. 1. 10
6. В практике использования ПЛК, и в схемотехнической её части, и в программной, постоянно присутствуют эти два понятия: аналоговый и дискретный. Даже на только – что приведенных рисунках видно, что есть блоки ввода обоих этих типов сигналов. Графически цепи передачи аналоговых сигналов могут обозначаться в одних программных средах утолщёнными, в других - сдвоенными линиями. Порты подключения аналоговых линий связи могут отмечаться только им присущей зеленоватого цвета подсветкой. Отдельные блоки могут иметь входы или выходы для аналоговых или дискретных сигналов. Цепи подключения этих сигналов на поле расположения программы отображаются по-разному, и соединять вход одного типа с выходом другого типа не допускается. Даже сами типы и модели контроллеров отличаются способами задания типов входов и выходов, их количества и т.д.
Дата добавления: 2015-02-09; просмотров: 227; Мы поможем в написании вашей работы!; Нарушение авторских прав |