КАТЕГОРИИ:
АстрономияБиологияГеографияДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРиторикаСоциологияСпортСтроительствоТехнологияФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Подключение источников сигналов
Входными сигналами переменного тока могут быть срабатывания некоторых контактов релейного типа – в этом случае их ввод выполняется простым соединением соответствующего входа с шиной L(+) источника питания контроллера через этот входной контакт, как это показано для входов (5) на рис. 1.17. Входные сигналы от активных источников, имеющие вид переменных напряжений, могут быть подключены подобным образом, но при обязательном соблюдении правила: не допускается соединять шину питания L и общую (нулевую) точку N.

Входные сигналы постоянного тока могут быть аналоговыми и использоваться для управления каким–либо параметром пропорционально введённому значению входной величины (вход 6 на рис. 1.17). Как правило, этот вид ввода осуществляется вместе с выполнением аналого-цифрового преобразования.
· Из характеристик аналоговых входов становится понятной очень важная для практической работы процедура выполнения аналого-цифрового преобразования при вводе аналоговых величин.

Начнем с того, что входной сигнал 10 В соответствует диапазону преобразования 0 ¸ 255 и разрешающая способность при этом равна (10000 / 256) мВ. Это можно представить себе иначе: восьмиразрядный АЦП (имеющий 28 - 1 = 255 дискретных уровней представления) преобразует установленный сигнал =10 В с разрешающей способностью 10000 / 256 = =39,0625 мВ. Поскольку результат преобразования выражается не кодом, а различными числами в диапазоне от 0 до 255, то можно было бы говорить не об аналого-цифровом, а об аналого-числовом преобразовании. Можно при этом оценивать величину вводимого сигнала следующим образом. Задаваемое число 1 соответствует 39,0625 мВ, число 100 – значению 3,906 В, а если задать число 200, то это будет означать 7,812 В. Иными словами, числа, получаемые в результате преобразования, есть не что иное, как число дискрет ценой 39,0625 мВ каждая, и это нужно учитывать при использовании соответствующего функционального блока, когда при описании параметров ввода аналогового сигнала предлагается ввести число от 0 до 255. Если схема в режиме отладки показала работоспособность при введённом числе 50 в поле описания АЦП, это означает, что на соответствующий вход следует подать напряжение, равное 50 × 39,0625 = 1953 мВ = =1,953 В. Таким образом осуществляется соответствие между «отвлечёнными» числами, занесёнными в поля описания блока, и внешней по отношению к контроллеру средой.
· Другая разновидность ввода сигналов постоянного тока связана с обеспечением сопряжения логических устройств. Известно, что принято различать элементы, работающие в положительной и отрицательной логике. Отличаются они тем, что в элементах положительной логики за логическую единицу принят высокий уровень напряжения, за логический нуль – низкий, а в отрицательной логике – наоборот. В правилах ввода сигналов постоянного тока в контроллер для этих целей предусмотрены два варианта. При А(“ - “ коммутации) соотношение уровней “логическая 1 / логический 0” принято как £ 4 В / ³ 18 В, а при В(“ + “ коммутации) этому же соответствует соотношение ³ 18 В / £ 4 В.
Настройка входов на тот или иной режим ввода понятна из рис. 1.17: в одном случае клемма А соединяется с минусом источника, а в другом случае клемма В – с плюсом.Следует иметь в виду, что такая настройка на вид применяемой логики предусмотрена не во всех типах контроллеров. Поэтому там, где этого нет, специфику работы датчика сигнала следует учитывать при составлении программы.


Рис. 1.17
Варианты подключения выходных цепей
Рис.1.18 иллюстрирует правила подключения релейных выходов, которые функционально предназначены для дискретного управления выходными цепями, т.е. такими, которые работают по принципу «включено / выключено». Их работа основана на замыкании и размыкании выходных цепей с помощью контактов, входящих во внутреннюю структуру контроллера.
Выходные цепи могут быть гальванически изолированы друг от друга (не иметь связи по постоянному току). Это позволяет подключать к ПЛК цепи, которые питаются различными напряжениями, как по величине, так и по характеру (постоянный / переменный). В этом случае проще обеспечить управление без образования нежелательных связей между коммутируемыми цепями.
В некоторых моделях контроллеров встречается объединение двух и более выходов с образованием общей точки. Поэтому характер соединения схемных компонентов объекта управления должен учитываться более внимательно.



Рис. 1.18
Кроме релейных выходов в ПЛК часто используются выходы транзисторные (рис.1.19). Они могут быть как дискретными, так и аналоговыми, когда величина выходного тока изменяется пропорционально управляющему воздействию.
Из сопоставления характеристик релейных и транзисторных выходов становятся очевидными более высокая коммутируемая мощность первых и более высокое быстродействие вторых.
Во всех случаях применения ПЛК средства защиты от перегрузок по току, напряжению, защиту контактов от искрения и т.д. необходимо предусматривать в схеме управляемого объекта.
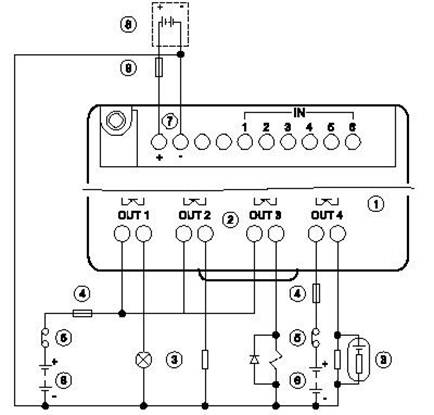


Рис. 1.19
Из приведённого описания структуры и характеристик контроллеров может сложиться ошибочное представление о том, что ПЛК – это небольшие, ограниченные по своим функциональным возможностям устройства, ориентированные на выполнение самых различных, но всё же несложных задач управления. Оправданием подобного впечатления могли бы стать такие особенности ПЛК, как сравнительно небольшое число входных и выходных портов для подключения сопрягаемых устройств, измерение временных соотношений интервалами 100 или 10 миллисекунд, что говорит о сравнительно невысоком их быстродействии, и т.д.
Такая точка зрения была бы справедливой лет 10 назад. Сейчас её с полным правом должно считать ошибочной в силу ряда причин.
· До сих пор рассматривались самые «лёгкие», самые простые типы ПЛК. У более сложных контроллеров эти «недостатки» проявляются в меньшей степени.
· На настоящий момент даже самые простые контроллеры допускают их объединение в сетевые структуры по стандартам и протоколам различных полевых шин, начиная с AS - интерфейса и выше. Это делает доступным значительное увеличение числа подключаемых устройств (датчиков и исполнительных механизмов), создаёт условия для пространственного распределения средств управления при территориальной удалённости их друг от друга, для достижения удобного соотношения преимуществ распределённого локального и централизованного управления объектом.
· Подключение любого датчика к персональному компьютеру требует аппаратного и программного их сопряжения и, следовательно, предъявляет более высокие требования к профессиональному уровню разработчика. В то же время программируемые логические контроллеры обеспечивают самые лёгкие условия для подключения к ним датчиков и исполнительных устройств.
· Модульная структура построения контроллеров, например, фирмы BECKHOFF [ ], для встроенных приложений обеспечивает высокую степень согласования мощных вычислительных ресурсов промышленного компьютера с той лёгкостью подключения датчиков и исполнительных устройств, которая свойственна логическим контроллерам, при информационном обмене компонентов по внутренней 15–ти битной магистрали K-bus. В результате получается быстродействующая, легко наращиваемая и переконфигурируемая в различные типы промышленных сетей структура, допускающая интеграцию её в общую информационную сеть предприятия, учреждения, интеллектуального дома и т.д..
Дата добавления: 2015-02-09; просмотров: 251; Мы поможем в написании вашей работы!; Нарушение авторских прав |