КАТЕГОРИИ:
АстрономияБиологияГеографияДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРиторикаСоциологияСпортСтроительствоТехнологияФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Нормируемые параметры (показатели), характеризующие кинематическую точность зубчатых колес и передач
Показатели кинематической точности и охватываемые ими степени точности приведены в таблице 4.2. Из таблицы следует, что требования к кинематической точности можно нормировать одним из 10 вариантов, содержащих требования к одному или двум параметрам. Один параметр применяется для нормирования в тех случаях, когда он полностью выявляет кинематическую погрешность (№ 1, 3, 10) или когда требования предъявляются к грубым колесам (№8, 9), где погрешность выявляется доминирующим параметром.
Параметры №1, 3, 10 выявляют суммарное влияние погрешности кинематической цепи зубообрабатывающего станка и погрешности точности установки заготовки зубчатого колеса относительно оси шпинделя или оси стола. При использовании нормирования двух параметров один из них выявляет погрешность от станка (т. н. тангенциальную составляющую – кинематический эксцентриситет), а другой – погрешность от установки заготовки (т. н. радиальную составляющую – геометрический эксцентриситет).
В таблице 4.2 параметры Fcr и FvWr характеризуют тангенциальную составляющую, а параметры Frr и Fir´´ – радиальную составляющую.
Таблица 4.2 – Нормируемые показатели кинематической точности зубчатых колес и передач
| № п/п | Нормируемые показатели точности | Условные обозначения | Степени точности |
| Наибольшая кинематическая погрешность зубчатого колеса | F´ir | 3 …8 | |
| Накопленная погрешность шага и накопленная погрешность «k» шагов зубчатого колеса | FРr | 3 … 6 | |
| Накопленная погрешность шага зубчатого колеса | FРr и FРkr | 7, 8 | |
| Погрешность обката и радиальное биение зубчатого венца | Fcr и Frr | 3 …8 | |
| Колебание длины общей нормали и радиальное биение зубчатого колеса | FvWr и Frr | 3 …8 | |
| Колебание длины общей нормали и колебание измерительного межосевого расстояния за оборот зубчатого колеса | FvWr и F´´ir | 5 …8 | |
| Погрешность обката и колебание измерительного межосевого расстояния за оборот зубчатого колеса | Fcr и F´´ir | 5 …7 | |
| Колебание измерительного межосевого расстояния за оборот зубчатого колеса | F´´ir | 10 … 12 | |
| Радиальное биение зубчатого венца (диаметр св. 1000 мм) | Frr | 8 …12 | |
| Наибольшая кинематическая погрешность передачи | F´iоr | 3 … 8 |
Рассмотрим параметры, нормируемые для выявления кинематической точности.
1. Кинематической погрешностью колеса (F´ir) называется разность между действительным (измеренным) и номинальным (расчетным) углами поворота зубчатого колеса на его рабочей оси, ведомого точным (измерительным) зубчатым колесом, при номинальном взаимном положении осей вращения этих колес. Выражается эта погрешность в линейных величинах длиной дуги делительной окружности (рисунок 4.21).
|
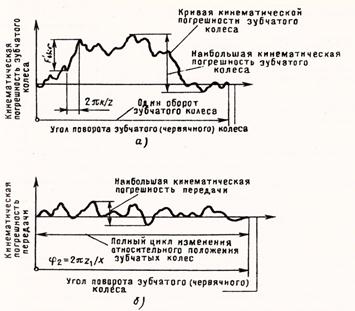
2. Кинематической погрешностью передачи (F´iоr) называется разность между действительным (измеренным) и номинальным (расчетным) углами поворота ведомого зубчатого колеса передачи. Выражается эта погрешность в линейных величинах длиной дуги его делительной окружности.
3. Накопленной погрешностью k шагов (FРkr) называется наибольшая разность дискретных значений кинематической погрешности зубчатого колеса при номинальном повороте на k целых угловых шагов (рисунок 4.22).
4. Накопленной погрешностью шага зубчатого колеса (FРr) называется наибольшая алгебраическая разность значений накопленных погрешностей в пределах зубчатого колеса. Данный параметр при измерениях определяется положение точек профилей зубьев, находящихся на одной окружности, проходящей где-то на середине каждого профиля зуба (рисунок 4.22).

Рисунок 4. 22 – Накопленная погрешность шага
5. Погрешность обката (Fcr) – погрешность, определяемая при вращении его на технологической оси, т. е. при окончательной обработке зубьев по обеим их сторонам на зубообрабатывающем станке, и при исключении циклических погрешностей зубцовой частоты и кратных ей более высоких частот. Таким образом, погрешность обката устанавливает требования к кинематической погрешности зубообрабатывающего станка (его кинематической цепи деления).
6. Колебание длины общей нормали (FvWr) называется разность между наибольшей и наименьшей действительными длинами общей нормали в одном и том же колесе. Под действительной длиной общей нормали понимают расстояние между двумя параллельными плоскостями, касательными к двум разноименным активным боковым поверхностям зубчатого колеса (рисунок 4.23). Если расстояние между плоскостями одинаково при измерении различных по положению на окружности колеса групп зубьев (число зубьев в группе постоянно), то кинематической погрешности зуборезного станка нет, происходит равномерное вращение при нарезании зубьев по всему колесу.
|

7. Колебанием измерительного межосевого расстояния за оборот колеса (F´´ir) называется разность между наибольшим и наименьшим действительным (измеренным) межосевым расстоянием при двухпрофильном зацеплении измерительного зубчатого колеса с проверяемым зубчатым колесом повороте последнего на полный оборот (комплексная радиальная погрешность, см. рисунок 4.24). Данный метод измерения называют двухпрофильным.

Рисунок 4.24 – Колебание измерительного межосевого расстояния за оборот
зубчатого колеса
8. Радиальным биением зубчатого венца (Frr) называется разность действительных (измеренных) предельных положений исходного контура в пределах зубчатого колеса (от его рабочей оси) (рисунок 4.25). Этот параметр характеризует дискретные значения колебаний измерительного межосевого расстояния за оборот или, другими словами, дискретные значения радиальной составляющей кинематической погрешности колеса.
|

Дата добавления: 2015-04-11; просмотров: 579; Мы поможем в написании вашей работы!; Нарушение авторских прав |