КАТЕГОРИИ:
АстрономияБиологияГеографияДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРиторикаСоциологияСпортСтроительствоТехнологияФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Классификация законов управления асинхронным электроприводом
Начало проектирования связано с синтезом системы управления, который базируется на обобщенном математическом описании электромеханической системы. Это описание представлено уравнением (3.10).
Разработка управляющих систем связана с математическими преобразованиями уравнений. Четыре первые уравнения, описывающие электромагнитную систему, всегда можно преобразовать таким способом, чтобы остались только два уравнения. В этом случае появляются десять возможных способов представления электромагнитной системы. Эти способы представлены на рис. 3.11. Величины векторов токов и потоков могут быть представлены в экспоненциональном либо в алгебраическом виде. В соответствии с этим управлять системой можно тремя способами:
- Изменением модуля вектора
- Изменением модуля и аргумента вектора
- Изменением проекций вектора на оси
В этом случае, появляются три возможных варианта построения системы управления:
- Скалярное
- Полярное
- Векторное
Полупроводниковый преобразователь может быть спроектирован как источник напряжения или как источник тока.
Таким образом, число возможных вариантов построения систем управления доходит до сорока.
После выбора (экспертом) одного из 40 возможных вариантов построения системы можно приступить к синтезу параметров регуляторов в этой системе с последующим анализом переходных и установившихся процессов. Этот выбор в приводах переменного тока является структурным синтезом.
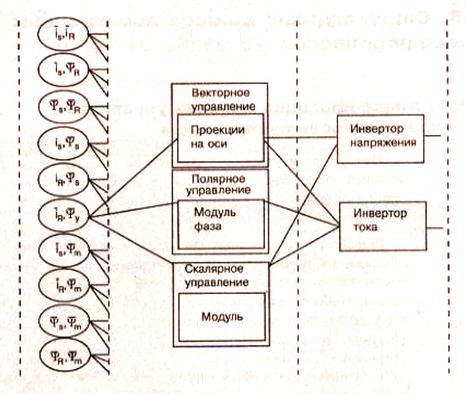
Рис.3.11. Классификация электромеханических систем
Дата добавления: 2015-04-16; просмотров: 286; Мы поможем в написании вашей работы!; Нарушение авторских прав |