КАТЕГОРИИ:
АстрономияБиологияГеографияДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРиторикаСоциологияСпортСтроительствоТехнологияФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Асинхронные электроприводы со скалярным управлением
Анализу различных способов скалярного управления в асинхронных электроприводах посвящено много работ . Такие способы управления использовались до того как , начили интенсивно развиваться векторные способы управления.
Скалярные способы управления обеспечивали достижение требуемых статистических характеристик и использовались в электроприводах со «спокойной» нагрузкой. На входе этих систем, как правило, включались задатчики интенсивности, которые ограничивали скорость нарастания (убывания) входного сигнала до такой величины, при которой процессы в системе можно считать установившимися, то есть в уравнении (3.2) можно было бы пренебречь слагаемым  , так как.(
, так как.(  )
)
Все законы скалярного управления базируются на математическом описании асинхронной машины в установившемся режиме работы во вращающейся системе координат. В этом случае v=const,  ,
,  =Us=const,is=Is=const,iR=IR=const все пространственные векторы неподвижны, неизменны по величине: - поэтому производные от потокосцеплений также равны нулю. Тогда уравнения (3.13) после преобразования примут вид:
=Us=const,is=Is=const,iR=IR=const все пространственные векторы неподвижны, неизменны по величине: - поэтому производные от потокосцеплений также равны нулю. Тогда уравнения (3.13) после преобразования примут вид:


 (3.16)
(3.16)
Где, 
Схема замещения асинхронного короткозамкнутого двигателя в установившемся режиме приведена на рис. 3.12. С использованием этой схемы замещения можно показать основные скалярные законы управления машиной. Этих законов четыре:

Рис.3.12. Схема замещения АКЗ.
Выражения момента для перечисленных законов управления находятся из схемы замещения:
1. 
 (3.17)
(3.17)
2. 
 (3.18)
(3.18)
3. 
 (3.19)
(3.19)
4. 
 (3.20)
(3.20)
На рис. 3.13. приведены механические характеристики асинхронного короткозамкнутого двигателя для всех четырех законов управления для линейной модели, не учитывающей насыщение магнита провода. Следует повторить, что перечисленные законы управления широко использовались и хорошо себя зарекомендовали в электроприводах, где не требуется быстродействия по управлению и нет резких изменений момента нагрузки.

Рис 3.13.Механические характеристики АКЗ при различных законах управления.
Простейшим из перечисленных законов является первый: Этот закон при использовании с синусоидальной ШИМ реализован практически во всех полупроводниковых преобразователях, которые выпускаются многочисленными фирмами и предлагаются на рынке. Удобство этого закона заключается в том, что электропривод может работать без отрицательной обратной связи по скорости и обладать естественной жесткостью механических характеристик в ограниченном диапазоне регулирования скорости.
В электроприводах со скалярным управлением для регулирования или стабилизации скорости используются и иные соотношения между частотой и напряжением. Выбор этого соотношения зависит от момента нагрузки и определяется из условий созранения перегрузочной способности:
 (3.21)
(3.21)
Где – Mmax максимальный момент АКЗ
Mн- момент нагрузки на валу машины.
Закон изменения напряжения и частоты, удовлетворяющий требованию при допущении, установлен М. П. Костенко. Этот закон имеет вид:
 (3.22)
(3.22)
Где – номинальные значения, приводимые в паспортных данных машины.
Если закон изменения момента заранее известен, то можно определить требуемое соотношение напряжения и частоты на выходе инвертора. Рассмотрим три классических вида нагрузок на валу машины:
 (3.23)
(3.23)
(3.24)
Механические характеристики АКЗ при регулировании для различных зависимостей момента от скорости приведены на рис. 3.14.
В имеющихся на рынке преобразователях часто предусматривается возможность перестройки с целью обеспечения всех трех законов. Схема электропривода, реализующая рассмотренные законы, показана на рис. 3.15. Функциональный преобразователь (ФП) реализует одну из зависимостей (3.23), определяемую характером нагрузки. Полупроводниковый преобразователь (ПП) включает в себя автономный инвертор и его систему управления, задатчик интенсивности (ЗИ), как уже было отмечено, формирует медленно нарастающий входной сигнал. В этом случае в электроприводе нарастание скорости не будет сопровождаться интенсивными колебаниями момента и тока, которые наблюдаются при прямом пуске.


(а) (б)
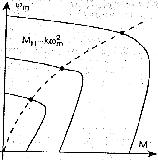
Рис.3.14.Механические характеристики.
(в)
При более сложных нагрузках используются иные законы скалярного регулирования, которые реализуются с использованием обратных связей. Эти законы рассмотрены выше на основании анализа работы асинхронной машины в установившемся режиме.

Рис.3.15. Функциональная схема разомкнутого АКЗ при скалярном управлении
Рассмотрим еще один скалярный закон управления, который используется при построении электроприводов с автономными инверторами тока – это закон Фr=const . Из схемы замещения нетрудно определить значение тока статора:
 (3.25)
(3.25)
Откуда можно найти зависимость между скалярными значениями тока статора потокосцеплением ротора и абсолютным скольжением:
 (3.26)
(3.26)
Реализация этой зависимости в электроприводе показана на функциональной схеме рис. 3.16. Такие системы получили название частотно-токовых.
. . 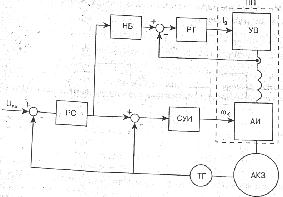
Рис. 3.16 Функциональная схема АКЗ со скалярным управлением.
Блок ПП в системе может быть реализован двояким способом. В первом случае рис. 3.16 он содержит управляемый выпрямитель , последовательный индуктивный фильтр и автономный инвертор. Следует подчеркнуть, что индуктивный фильтр придает инвертору характеристику источника тока. Такой источник тока называется параметрическим.
Подчеркнем одну характерную особенность этой структуры, благодаря наличию индуктивности, управляемый выпрямитель может быть приведен в режим ведомого сетью инвертора . В этом случае, механическая энергия с вала асинхронной машины может быть рекупирована в сеть.
Таким свойством не обладают системы с АИН. В них для реализации рекуперации необходимо использовать отдельный сетевой вектор.
Во втором случае, источник тока реализуется специальным управлением инвертора с реализацией, так называемого токового коридора.
Дата добавления: 2015-04-16; просмотров: 734; Мы поможем в написании вашей работы!; Нарушение авторских прав |