КАТЕГОРИИ:
АстрономияБиологияГеографияДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРиторикаСоциологияСпортСтроительствоТехнологияФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Двигатели постоянного тока и их характеристики
1. Пуск двигателей постоянного тока.
Напряжение, подводимое к зажимам двигателя, уравнивается противо ЭДС, наводимой на обмотке якоря при его вращении и падением напряжения в цепи якоря U=Е-Iяrя.
Ток якоря  При номинальной нагрузке ЭДС составляет (0,93-0,97) Uм.
При номинальной нагрузке ЭДС составляет (0,93-0,97) Uм.
так как сопротивление якоря невелико. В момент пуска  ток будет в десятки раз превышать номинальный, что нежелательно, так как вызовет толчок момента и кроме того, опасно для щеточно-коллекторного контакта и вызывает снижение напряжения на других потребителях. Поэтому в цепь якоря при пуске вводят добавочное сопротивление, которое избирают таким, чтобы пусковой ток не превышал номинального более чем в полтора-два раза. Для обеспечения большого пускового момента необходимо создать, возможно большой магнитный поток Ф. Зависимость тока якоря и скорости двигателя при пуске от времени представлены на рис. 4.23. Эти зависимости снимают при постоянном сопротивлении цепи якоря и постоянном моменте на валу двигателя.
ток будет в десятки раз превышать номинальный, что нежелательно, так как вызовет толчок момента и кроме того, опасно для щеточно-коллекторного контакта и вызывает снижение напряжения на других потребителях. Поэтому в цепь якоря при пуске вводят добавочное сопротивление, которое избирают таким, чтобы пусковой ток не превышал номинального более чем в полтора-два раза. Для обеспечения большого пускового момента необходимо создать, возможно большой магнитный поток Ф. Зависимость тока якоря и скорости двигателя при пуске от времени представлены на рис. 4.23. Эти зависимости снимают при постоянном сопротивлении цепи якоря и постоянном моменте на валу двигателя.
При увеличении скорости противо ЭДС растет, ток уменьшается, и пусковое сопротивление постепенно выводят.
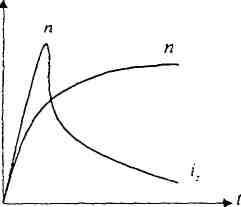
Рис. 4.23
2 Регулирование скорости двигателей постоянного тока.
Как известно ЭДС якоря Е = СЕпФ
отсюда
 (4.13)
(4.13)
Ток якоря двигателя при установившемся вращении определяется моментомнагрузки на валу и магнитным потоком.
 (4.14)
(4.14)
отсюда
 (4.15)
(4.15)
Последнее равенство является уравнением механической характеристики двигателя постоянного тока. Как видно из формулы, скорость вращения можно регулировать, изменяя входное напряжение, поток (изменением тока возбуждения), сопротивление цепи якоря.
3. Двигатели независимого и параллельного возбуждения.
Для обеспечения максимального магнитного потока цепь возбуждения двигателя параллельного возбуждения включается непосредственно в сеть без пускового реостата. Реостат rв в цепи возбуждения должен быть при этом выведен. Обмотка возбуждения может быть включена на дополнительный ниточник напряжения. Ток якоря определяется моментом и магнитным потоком машины. Если пренебречь полем тока якоря, то при Iя=const магнитный поток Ф - постоянный, следовательно в двигателях параллельного возбуждения ток ккром пропорционален моменту на валу

|
 (4.16)
(4.16)

Рис.4.24
Скорость вращения якоря
 (4.17)
(4.17)
Так как
 (4.18)
(4.18)
Идеальная скорость вращения двигателя при нахождении U и при М0=0 и Iм=0
 - скорость холостого хода
- скорость холостого хода
тогда 
Так как Iм ~ М , то уравнение механической характеристики для двигателя с параллельным возбуждением имеет вид  Прямая 1 соответствует естественной механической характеристики при г0=0. Как видно, при изменении момента от О до Мн скорость п уменьшается незначительно. Такую характеристику называют "жесткой". При введении добавочного сопротивления наклон механической характеристики увеличивается (прямая 2), она становится "мягкой". Изменением добавочного сопротивления, как уже говорилось, можно регулировать скорость вращения двигателя (реостатное регулирование),
Прямая 1 соответствует естественной механической характеристики при г0=0. Как видно, при изменении момента от О до Мн скорость п уменьшается незначительно. Такую характеристику называют "жесткой". При введении добавочного сопротивления наклон механической характеристики увеличивается (прямая 2), она становится "мягкой". Изменением добавочного сопротивления, как уже говорилось, можно регулировать скорость вращения двигателя (реостатное регулирование),

Рис. 4.25
однако этот способ применяется преимущественно для двигателей малой мощности, так как он связан с большими потерями мощности в цепи якоря. Другой способ регулирования скорости - изменение магнитного потока. Каждому значению магнитного потока соответствует свое значение скорости холостого хода n0 и пускового момента Мпуск. Зависимость скорости двигателя от тока возбуждения при холостом ходе и U = Uн определяется регулировочной характеристикой холостого хода.

Рис. 4.26
Из рис. 4.27. видно, что уменьшение тока возбуждения ведет к тому, что скорость ненагруженного двигателя резко возрастает, двигатель идет "вразнос".
Во избежание этого двигатель снабжают аппаратурой защиты. В двигателях независимого возбуждения регулировать скорость, можно изменяя напряжение на якоре.

Рис. 4.27
4. Двигатели последовательного возбуждения.
В таких двигателях ток якоря и ток возбуждения один и тот же.
Характеристика намагничивания нелинейная. С увеличением момента нагрузки ток двигателя увеличивается, магнитный поток возрастает, скорость падает, подчиняясь к закону близкому к гиперболическому.
 (4.19)
(4.19)

Рис. 4.28.
При холостом ходе ток и магнитный поток двигателя уменьшаются, скорость быстро возрастает. Двигатель "идет вразнос". Пуск таких двигателей в холостую недопустим. Скорость регулируется изменением добавочного сопротивления и изменением тока возбуждения путем шунтирования обмотки возбуждения.
Двигатель последовательного возбуждения применяется как тяговый, там, где необходимо создать максимальный пусковой момент.

Рис. 4.29
5. Двигатель смешанного возбуждения.
Последовательная и параллельная обмотка возбуждения включается как правило, согласно, намагничивающие силы их складываются. В этом случае, двигатель имеет характеристики "средние" между характеристиками двигателей с последовательным и параллельным возбуждением. При встречном включении обмоток (причем, намагничивающая сила последовательной обмотки намного меньше, чем параллельной), можно получить ''жесткую" механическую характеристику n = const.

Рис. 4.30.
Двигатели смешанного возбуждения применяются в тех случаях когда необходим большой пусковой момент и быстрое изменение скорости - для прокатных станов, компрессоров, насосов и т.д.
Дата добавления: 2015-04-16; просмотров: 324; Мы поможем в написании вашей работы!; Нарушение авторских прав |