КАТЕГОРИИ:
АстрономияБиологияГеографияДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРиторикаСоциологияСпортСтроительствоТехнологияФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
КРАНОВАЯ АППАРАТУРА УПРАВЛЕНИЯ И ЗАЩИТЫ
Крановые силовые кулачковые контроллеры.С помощью их осуществля-ются пуск, остановка, реверс и регулирование угловой скорости крановых электро-двигателей как постоянного, так и переменного тока. В настоящее время силовые контроллеры применяются для переключений в главных цепях, двигателей мощ-ностью до 30кВт при Л, С и Т режимах работы механизмов крана и от 30 до 75кВт при Л и С режимах. Приводным органом кулачковых контроллеров на постоянном токе является маховичок, а на переменном токе - рукоятка. Каждое рабочее, а также нейтральное (нулевое) положение имеет фиксацию.
Для управления асинхронными двигателями с фазным ротором предназначены контроллеры типов ККТ-61 и ККТ-61А, ККТ-62 и ККТ-62А, ККТ:68А, ККТ-101, ККТ-102, имеющие симметричную для обоих направлений движения механизма схему замыкания контактов. В контроллере ККТ-68А обмотки статора двигателя коммутируются двумя контактами реверса. Для управления асинхронными двига-телями с короткозамкнутым ротором выпускаются контроллеры типа ККТ-63, а 
 для механизмом подъёма – также типа ККТ М. Последний позволяет обеспечить низкие скорости при посадке груза путём включении двигателя в режим однофазного тор-можения на первом положении «Спуск» рукоятки контроллера.
для механизмом подъёма – также типа ККТ М. Последний позволяет обеспечить низкие скорости при посадке груза путём включении двигателя в режим однофазного тор-можения на первом положении «Спуск» рукоятки контроллера.
В схемах управления двигателями постоянного тока применяются силовые контроллеры типов ККП-101 для механизмов передвижения кранов и ККП-102 для механизмов подъёма.
Магнитные контроллеры.Они служат для управления двигателями механиз-мов кранов средней и большой производительности при мощностях двигателей до 150кВт и напряженном режиме работы с высокой частотой включений. Магнитные контроллеры используются для приводов мощностью до 10кВт при ВТ режиме до 30кВт при Т и ВТ режимах и свыше 30кВт при С,Т и ВТ режимах. В таких кон-троллерах все переключения в силовых цепях двигателей производятся контактора-ми, катушки которых получают питание через контакты малогабаритного коман-доконтроллера типа КП,установленного в кабине, а аппаратура управления и защи-ты монтируется на специальной панели, которая выносится па мост крана. Привод-ным органом командоконтроллера служит рукоятка. Магнитные контроллеры наиболее универсальные средства управления крановыми электроприводами.
Конструктивно панели магнитных контроллеров выполняются в двух вариан-тах: каркасно-реечными и панельными на изоляционных досках. Каркасно-реечные конструкции имеют одну ступень изоляции между токоведущими частями и корпу-сом и используются для кранов, работающих в обычных производственных помещениях. Панельные конструкции имеют две ступени изоляции и применяются для кранов производств с большой концентрацией токопроводящей пыли. При установке магнитных контроллеров на открытых для доступа людей площадках они разме-щаются в стальных шкафах с запирающимися дверями.
Для управления двигателями механизмов передвижения используются маг-нитные контроллеры трех серий П, Т и К. У контроллеров серии П силовые цепи и цепей управления получают питание от сети постоянного тока, у контроллеров серии Т - от сети переменного тока. В контроллерах серий К применяются ап-параты управления постоянного тока, которые более надёжны в эксплуатации и до-пускают большую частоту включений, чем контакторы и реле переменного тока. Все указанные контроллеры имеют симметричные схемы.
Дли управления электроприводами механизмов подъёма применяются не-симметричные магнитные контроллеры серий ПС, ТС и КС, которые позволяют получать от двигателей низкие посадочные скорости при спуске грузов. Буква А в обозначении типа контроллера подчеркивает, что управление двигателем автомати-зировано в функции - времени или ЭДС, например ПСА, ТСА и др. Для управления двухдвигательным приводом кранов с тяжёлым режимом работы на механизмах пе-редвижения применяются магнитные контроллеры серий ДП, ДТ и ДК, а на ме-ханизмах подъёма - ДПС, ДТС и ДКС. Сдвоенные панели имеют двойной комплект аппаратуры, которая переключается для управления одним или двумя двигателями. По принципу работы эти панели не отличаются от одинарных панелей.
Выбор силовых и магнитных контроллеров производят по роду тока, назна-чению механизма, электрической схеме, мощности инапряжению двигателя, ин-тенсивности работы механизма (числу включений в час).
Крановые конечные выключателислужат для предотвращения перехода ме-ханизмами предельно допустимых положений (ограничение подъёма грузозах-ватывающего устройства, или хода тележек и мостов), а также блокировки откры-вания люков и дверей кабины. Указанная защита преимущественно выполняется посредством рычажных конечных выключателей поворотного типа, которые проще по устройству и надежнее в работе, чем выключатели нажимного типа.
Для механизмов передвижения чаще всего используют выключатели с само-возвратом в исходное положение. Для ограничения верхнего положения крюка применяется выключатель с грузовым приводом. Если необходимо ограничить и верх-нее и нижнее положения захватывающего устройства, то устанавливают вращающиеся конечные выключатели, связанные с одним из валов механизма подъёма.
В схемах управления крановыми электроприводами применяются следующие типы конечных выключателей; КУ-701 и КУ-706 — рычажные с самовозвратом (для механизмом пероднижония); КУ-703 - ссамовозвратомпод действием груза (для механизмов подъёма).
Резисторы в крановых электроприводах применяются для пуска, регулиро-вания угловой скорости и торможения двигателей, для цепей возбуждения и управ-ления, а также для тормозных и подъёмных электромагнитов. Стандартные ящики резисторов выполняются с литыми чугунными (серии ЯС), ленточными фехралевы-ми (серии КФ) или проволочными константановыми (серии НС) элементами, имею-щими одинаковый длительно допустимый ток для всех секций ящика. Из комбина-ций таких ящиков или включения различных секций последовательно и параллельно можно подобрать любые необходимые сочетания ступеней сопротивления.
Крановые резисторы выбираются по условиям повторно-кратковременного режима работы. Номинальную продолжительность включения ПВН0М принимают различной в зависимости от режима работы крана. Например, для кранов общего назначения при лёгком режиме работы для резисторов ПВНОм=12,5%, для среднего режима ПВНом=25%, для тяжёлого ПВ11ОМ=30%. Следует помнить, что не все ступени сопротивления находятся в одинаковых условиях в отношении нагрева: при пуске продолжительность включения больше для тех ступеней, которые отключают-ся последними. Кроме того, больше вероятность включения тех же ступеней при регулировании угловой скорости двигателя. Поэтому значение ПВНОм относятся только к последней ступени, а для остальных ступеней выбирают значения ПВ, убывающие пропорционально доли сопротивления, выводимой при замыкании каждой ступени.
Не выключаемые резисторы рассчитываются на номинальный ток ротора дви-гателя и на значение ПВ, равное или большее принятого для двигателя. Постоянная времени нагрева у резисторов значительно меньше, чем у двигателей, и кратковре-менные перегрузки, допустимые для двигателя, могут быть опасными для резисторов. Кроме того, независимо от расчетного значения ПВ каждая ступень сопро-тивления должна выдерживать кратковременную нагрузку номинальным током дви-гателя длительностью не менее 30 с.
Полный расчёт и выбор резисторов, включающий определение суммарного сопротивления, разбивку его по ступеням согласно расчетам пусковых, тормозных и ре-
 |
минального сопротивления двигателя RНом. Такие каталожные таблицы составлены применительно к типовым схемам контроллеров. Так, в табл. 3-1 приведена разбивка несимметрично включенных резисторов по фазам ротора асинхронного двигателя, управляемого кулачковым контроллером ККТ-101.
Для двигателей постоянного тока Rном=Uном/Iм,
где (Uном и Iном — номинальные напряжения и ток якоря двигателя; для асин-хронных двигателей с фазным ротором Rном=E2k/ 3I2ном, где Е2к и I2ном - ЭДС между кольцами неподвижного разомкнутого ротора и номинальный так ротора.
Выбор резисторов по нагреву производят для каждой ступени по эквивалент-ному длительному току, который определяется по формуле:

 где kи -коэффициент, который для ступеней ускорения принимается рав-ным 1,25, для ступени противовключения 1,0 и для предварительной ступени 0,8;
где kи -коэффициент, который для ступеней ускорения принимается рав-ным 1,25, для ступени противовключения 1,0 и для предварительной ступени 0,8;
Iдоп - дополнительно допустимый ток резистора, А.
Крановые защитные панели применяют при контроллерном управлении двигателями крана, а также вместе с некоторыми магнитными контроллерами, не имеющими собственных аппаратов защиты. На защитной панели установлена элект-роаппаратура, осуществляющая максимальную защиту от токов к.з. и значитель-ных (свыше 250%) перегрузок крановых двигателей, а также нулевую защиту, ис-ключающую самозапуск двигателей после перерыва в электроснабжении. В схему защитной панелий вводят контакты различных аппаратов, обеспечивающих надёж-ность работы крана и безопасность его обслуживания, например контакты конеч-ных выключателей, контакты люка кабины и аварийного выключателя, вспомога-тельные контакты силовых контроллеров.
Защитная панель представляет собой металлический шкаф с установленной в нём аппаратурой. Шкаф закрыт дверью с замком. Второй замок сблокирован с глав-ным рубильником. Размещаются защитные панели обычно в кабине крана.
Для защиты двигателей переменного тока с подключенными к ним проводами используются крановые защитные панели типов ПЗКБ-160 и ПЗКБ-400 на напряжения 220,380 и 500В, для защиты двигателей постоянного тока - панели типа ППЗКБ-150 на 220 и 440В. Панели допускают подключение от трёх до шести двигателей. В зависимости: от числа защищаемых двигателей и соотношения их мощнос-тей панели комплектуются соответствующим количеством блок-реле максимального тока, которые при срабатывании воздействуют на один, общий для группы из двух — четырех реле контакт; этим уменьшается число контактов в схеме. Установка на панелях блок-реле даёт возможность защищать двигатели различной мощности.
На рис. 3-8 показана принципиальная электрическая схема защитной панели типа ПЗК для трех двигателей переменного тока. Основной аппаратурой панели яв-ляются: вводный выключатель (рубильник) ВВ; контактор ДЛ; два групповых реле (РМ и РАЮ), Состоящих из блок-реле максимального тока РМ1—РМЗ — для защиты отдельных двигателей и блок-реле РМ01 и РМ02
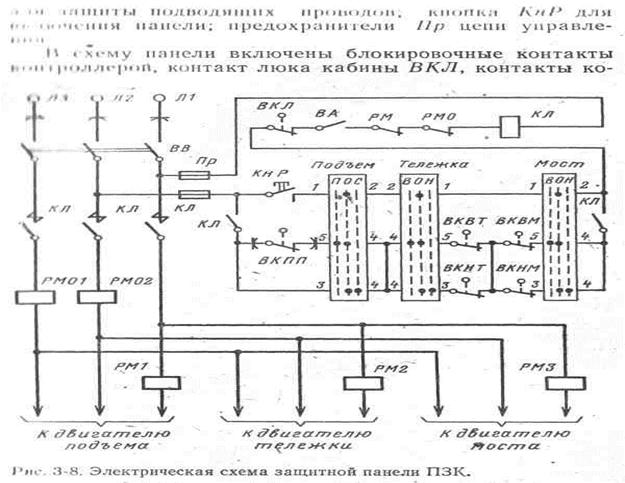
нечных выключателей механизмов подъёма ВКПП и передвижения ВКВМ, ВКНМ, ВКВТ, ВКНТ, выключатель ВЛ для аварийного отключения панели. Блок-реле при срабатывании размыкают контакты РМ и РМО в цепи катушки линейного контак-тора КЛ, который отключает нее двигатели от сети.
Контактор КЛ можно включить нажатием кнопки КнР, если замкнуты кон-такты ВКЛ, ВА, РМ, РМО и контакты 1-2 контроллеров. Для замыкания контактов ВКЛ и 1-2 необходимо закрыть, люк, ведущий из кабины на мост и установить кон-троллеры в нулевое (0) положение. После включения контактор КЛ своими замы-кающими вспомогательными контактами создаёт цепь, самопитания, которая прохо-дит через контакты 3-4 и 4-5 контроллеров и конечных выключателей всех трёх ме-ханизмов, а главными контактами подаёт напряжение на силовые цепи двигателей.
Схема защитной панели ПЗК составлена так что включение двигателя возмо-жно только для движения механизма,в сторону рабочей зоны. При этом питание ка-тушки КЛ осуществляется через контакт конечного выключателя, ограничиваю-щего движение в данном направлении. Например, при установке контроллера моста в положение В, т. е. для движения «Вперёд» контакт 3-4 размыкается, а контакт 4-5 остаётся замкнутым по этому катушка КЛ получает питание через контакт конеч-ного выключателя ВКВМ и будет отключена, если мост дойдет до крайнего поло-жения «Вперёд». Для механизма подъёма предусмотрен только один конечный
выключатель ВКЛП, так как нижний предел спуска не ограничивается.
Для защиты трехфазных асинхронных двигателей от перегрузок достаточно иметь токовые реле в одной фазе каждого двигателя (блок-реле РМ1, РМ2 и РМЗ), а
две другие фазы двигателей можно объединить под общие блок-реле РМ01 и РМ02, которые защищают линейные провода от к.з. Нулевая защита обеспечивается самим контактором КЛ. После срабатывания любого из аппаратов защиты или конечных выключателей вновь включить схему в работу можно лишь после возврата всех кон-троллеров в нулевое положение.
На рис.3-9 изображена принципиальная электрическая схема защитной панели типа ППЗК для трёх двигателей постоянного тока. Кроме общего контактора КЛО, соединяющего контактный провод Л2 со всеми двигателями, панель имеет контак-торы КЛ1—КЛЗ для подключения двигателей через соответствующие контроллеры к другому контактному проводу Л1. Контактор КЛО включается кнопкой КнР и остается включённым в течение всего времени при нормальной работе крана. Кон-такторы КЛ1-КЛЗ включаются и отключаются контактами 3-4 и 4-5 контроллеров при каждом пуске и
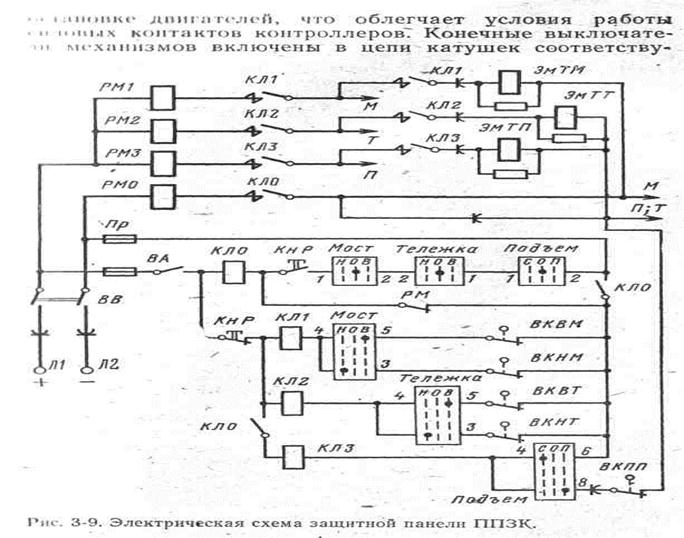 |
ющих контакторов, поэтому в крайнем положении какого-либо механизма отклюю-чается только двигатель данного механизма, а не вся защитная панель, что создает удобства для работы оператора.
Размыкающий контакт кнопки КнР предотвращает одновременное с контак-тором КЛО включение контакторов КЛ1—КЛЗ которое при наличии к.з. в цепи управления или силовой цепи могло бы привести к аварии. В главную цепь каждого двигателя включена катушка группового, реле РМ (катушки РМ1—РМЗ), кроме того, одна катушка реле РМО включена в общий силовой провод. Обмотки тор-мозных электромагнитов моста ЭмТМ, тележки ЭмТТ и подъёма ЭмТП подклю-чаются к сети замыкающими вспомогательными контактами соответствующих кон-такторов.
Дата добавления: 2014-11-13; просмотров: 121101; Мы поможем в написании вашей работы!; Нарушение авторских прав |