КАТЕГОРИИ:
АстрономияБиологияГеографияДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРиторикаСоциологияСпортСтроительствоТехнологияФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
МНОГООПЕРАЦИОННЫЕ СТАНКИ И ПРОМЫШЛЕННЫЕ РОБОТЫ
В последние годы всё большее распространение получают станки с автомати-зированной сменой инструмента - многооперационные станки (обрабатывающие центры). Сменой инструмента управляет СЧПУ по соответствующей рабочей программе.
|
Подобные станки выполняются с револьверными головками либо с инструментальными м а газинами.
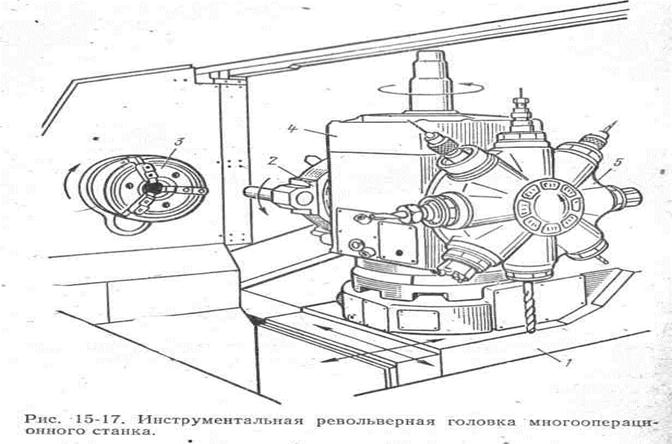
На рис.15-17 показан узел многооперационного станка для токарной и фрезерно-сверлильной обработки деталей типа тел вращения. Обрабатываемая деталь закреп-ляется в шпинделе 5. Две револьверные головки с инструментами для токарной обработки (головка 2) и фрезерно-сверлильной обработки (головка 5) расположены на шпиндельной бабке 4, которая может поворачиваться на 360° вокруг вертикальной оси. Бабка 4 установлена на столе 7, обеспечивающем движение продольной и поперечной подачи.
Станки с инструментальными магазинами оснащаются автооператорами, при по-мощи которых нужный инструмент извлекается из магазина и устанавливается в рабочее
 |
положение в шпинделе станка, а ранее использованный инструмент возвращается на свое месте в магазине.
Качественно новым решением в автоматизации процессов металлообработки яви-лось создание машин нового технологического класса - универсальных автономных мани-пуляторов с программным управлением – п р о мышленных роботов.
Промышленный робот представляет собой механическую руку, т. е. техническое ус-тройство, предназначенное для автоматического воспроизведения двигательных функций верхней конечности человека. Промышленные роботы могут иметь до десяти степеней свободы и способны осуществлять большое число операций по захвату, переме-щению и установке деталей. Роботы могут быть выполнены как стационарными, так и подвижными. Исполнительным элементом робота является захват. У подвижных роботов в исполнительную часть входит также механизм перемещения робота. Все подвижные элементы робота снабжены отдельными приводами (электрическими, гидравлическими, пневматическими). Управление движениями робота осуществля-

ется от системы циклового или числового программного управления.
Применение промышленных роботов позволяет заменить ими производс-твенных рабочих на циклически повторяющихся тяжёлых и однообразных опера-циях, стимулирует переход на прогрессивные методы поточного производства и соз-даёт предпосылки для коренного решения проблем автоматизации как отдельных производственных операций, так и производства в целом.
На рис.15-18 схематически изображён один из вариантов стационарного промышленного робота. На неподвижном основании 1 установлен стол 2 со стойкой 3. Стол может поворачиваться вокруг оси 0-0. По стойке перемещается вдоль оси 0-0 каретка 4, несущая руку робота 5. В свою очередь, рука может двигаться по каретке вдоль оси О1-О1 Кисть 6 руки с захватом 7 поворачивается относительно самой руки в двух направлениях: вокруг осей 01-01 и 02 - 02. Открытие и закрытие захвата обеспечивается путём перемещения его подвижных губок. Не считая перемещения губок захвата, показанный на рисунке робот имеет пять степеней свободы.
На рис.15-19 показаны возможные компоновки станков 2 с роботом 1 и накопителями 3. Стационарный робот можно поставить для обслуживания одного (рис.15-19,а) или нескольких станков (рис.15-19,б), подвижной робот может пере-мещаться вдоль фронта станков (рис.15-19,в). Во всех этих случаях реализуется участок, на котором полностью автоматизированы все основные и вспомогательные операции. Связав подобного рода участки системами транспортировки деталей, можно получить автоматические линии и цеха.
Промышленные роботы применяют в кузнечно-прессовом производстве, в литейных цехах, в электросварочных, гальванических и окрасочных установках, в сборочных цехах и т. д.
Дата добавления: 2014-11-13; просмотров: 616; Мы поможем в написании вашей работы!; Нарушение авторских прав |