КАТЕГОРИИ:
АстрономияБиологияГеографияДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРиторикаСоциологияСпортСтроительствоТехнологияФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Обобщенные силы
Удобно связать со всякой обобщенной координатой q некоторую обобщенную силу Q. Обобщенные силы  отражают взаимодействие подсистем внутри консервативной механической системы.
отражают взаимодействие подсистем внутри консервативной механической системы.
Внешние силы. Внешней силой можно представить (с той или иной точностью) всякое возмущение, действующее извне на консервативную механическую систему. Источники внешних сил по своему физическому происхождению можно разделить на 3 группы:
– явления немеханической природы, которые приближенно учитываются механикой (например, трение);
– целенаправленные воздействия на механическую систему (управления);
– явления, связанные с неполнотой математической модели механической системы (скрытые переменные [3]).
Технологические силы. вектор технологических сил может быть связан с системой координат на обрабатываемой поверхности детали, инструмента и т. д.
Задача статики делится на прямую и обратную. Прямая задача состоит в том, чтобы по известному вектору внешних сил в сочленениях механизма (реакциям связей) определить главный вектор и главный момент сил  в расчетной точке рабочего органа механизма. При известных кинематической схеме механизма, системе технологических координат и заданном n-мерном векторе прямая задача статики дает возможность рассчитать шестимерный вектор технологических сил :
в расчетной точке рабочего органа механизма. При известных кинематической схеме механизма, системе технологических координат и заданном n-мерном векторе прямая задача статики дает возможность рассчитать шестимерный вектор технологических сил :
 ,
,
где Fx, Fy, Fz – проекции главного вектора сил в системе технологических координат; Mx, My, Mz – проекции главного момента сил в системе технологических координат.
Обратная задача статики состоит в том, чтобы по известному главному моменту технологических сил в системе технологических координат определить вектор (реакций связей): 
При n > 6 обратная задача статики имеет множество решений. Поскольку внешние силы следует считать управляющими силами, решение прямой и обратной задач статики входит в задачу построения управления по вектору силы. Управление по вектору силы необходимо при сварке, шлифовке, нанесении покрытий, сборке.
18. Обратная задача статики для машины с пространственным движением: постановка задачи и основные определения.
Обратная задача статики состоит в том, чтобы по известному главному моменту технологических сил в системе технологических координат определить вектор (реакций связей):
При n > 6 обратная задача статики имеет множество решений. Поскольку внешние силы следует считать управляющими силами, решение прямой и обратной задач статики входит в задачу построения управления по вектору силы. Управление по вектору силы необходимо при сварке, шлифовке, нанесении покрытий, сборке.
(Что нить дописать)
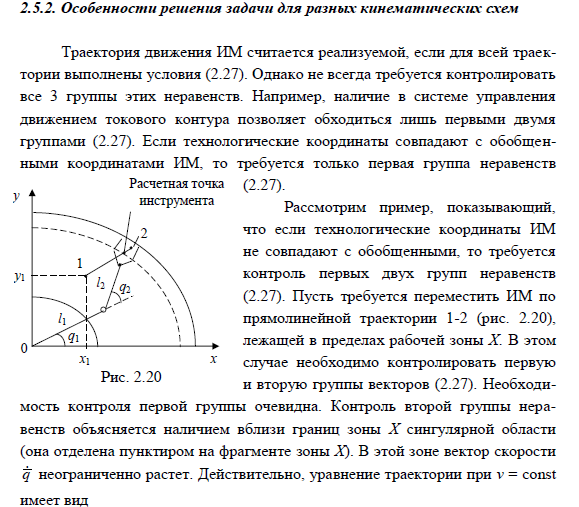
20. Задача контроля ограничений параметров движения: постановка задачи, её назначение, примеры.

Дата добавления: 2015-04-21; просмотров: 287; Мы поможем в написании вашей работы!; Нарушение авторских прав |