КАТЕГОРИИ:
АстрономияБиологияГеографияДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРиторикаСоциологияСпортСтроительствоТехнологияФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Понятие нормы. Использование норм при построении задачи управления движением.


5. Интерпретатор кадра управляющей программы: задачи первого и второго проходов. Алгоритм интерпретации.




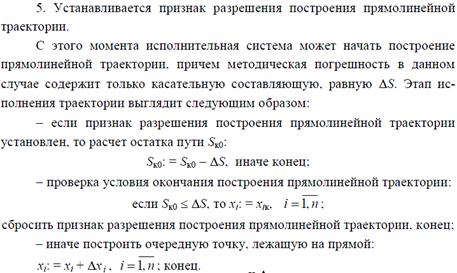
7. Построение прямолинейной траектории: подготовительные и диагностические опе-рации. Алгоритм построения программной траектории.


9. Задача координатных отображений: постановка задачи. Основные определения.



11. Обратная кинематическая задача: постановка задачи, её назначение, способы решения.
ОЗК – обратная задача кинематики. ОЗК состоит в отыскании вектора обобщенных координат механизма по его заданной кинематической схеме и вектору положения и ориентации инструмента в заданной технологической системе координат.
Вектор положения и ориентации x в нашем случае пятимерный:
x = [φaβϑ1ϑ2]T,
а вектор обобщенных координат q:
q = [q1q2q3q4q5]T,
где вектором обобщенных координат называют вектор из n переменных, где n – число степеней свободы.
сложность, связанная с решением обратной задачи кинематики, заключается в том, что аналитические соотношения содержат, как правило, обратные тригонометрические функции, которые являются неопределенными при некоторых значениях углов, что вносит дополнительную неопределенность в решение обратной задачи.
Существуют различные методы получения решения обратной задачи, но, в целом, все методы решения обратной задачи кинематики можно разделить на аналитические и численные. Ниже рассмотрены ограничения, достоинства и недостатки каждого из методов.

13. Погрешность, возникающая при решении задачи координатных отображений.


ДОПИСАТЬ то, что относится к координатным отображениям
Дата добавления: 2015-04-21; просмотров: 304; Мы поможем в написании вашей работы!; Нарушение авторских прав |