КАТЕГОРИИ:
АстрономияБиологияГеографияДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРиторикаСоциологияСпортСтроительствоТехнологияФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Тормозные режимы ДПТ НВ
Электродвигатели постоянного тока независимого возбуждения могут работать в трех тормозных режимах: режиме рекуперативного торможения, динамического торможения и торможения противовключением.
Режим рекуперативного генераторного торможения имеет место, когда скорость двигателя превышает скорость холостого хода, т.е. со > со0 (рис. 7). При этом ЭДС якоря Ея превышает напряжение питания якорной цепи (Ея > (1Я) и ток в якорной цепи пойдет под действием ЭДС якоря Ея знак тока будет противоположен знаку напряжения питания. Это означает, что энергия торможения отдается в сеть питания постоянного тока. Следовательно, существуют три условия существования режима рекуперативного торможения:
1)цепь питания должна обеспечивать возможность протекания тока навстречу напряжению источника питания; это условие особенно важно в случае питания двигателя постоянного тока от полупроводниковых преобразователей, элементы которых обладают односторонней проводимостью тока;
2)источник питания должен быть способен воспринимать отдаваемую двигателем энергию и передавать ее в сеть питания; режим рекуперативного торможения невозможен, если привод получает питание от автономной дизель-генераторной установки;
3) для того чтобы рекуперативное торможение было возможно в пределах заданного диапазона регулирования скорости, регулирование должно проводиться путем изменения напряжения, подводимого к якорной цепи двигателя.

|
Рис. 7. Механические характеристики двигателя постоянного тока в двигательном режиме и режиме рекуперативного торможения
Основные достоинства рекуперативного торможения: энергетическая эффективность, связанная с полезным использованием энергии торможения; высокая жесткость механических характеристик; плавный переход из двигательного в тормозной режим на одной и той же характеристике. Благодаря такому характеру механических характеристик улучшается качество управления приводом.
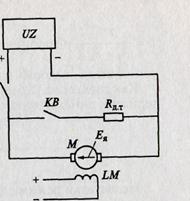
Вторым возможным тормозным режимом является режим динамического торможения. В этом режиме якорь двигателя отключается от источника постоянного тока (рис. 8) и замыкается на резистор динамического торможения Rдт.
Питание обмотки возбуждения при этом должно быть обязательно сохранено. В указанном режиме двигатель М работает как генератор постоянного тока, нагруженный на резистор Rдт . Энергия торможения расходуется на нагрев резистора Rдт и обмотки цепи якоря двигателя. Механические характеристики при динамическом торможении представлены на рис. 5.9.
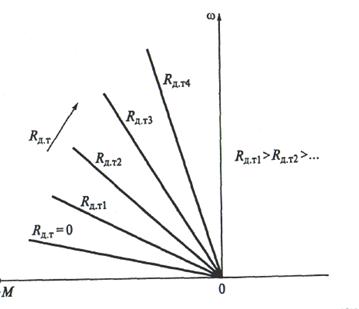
Рис. 8. Механические характеристики двигателя постоянного тока независимого возбуждения в режиме динамического торможения
Недостатки режима динамического торможения: потери энергии торможения, расходуемой на нагрев элементов привода; невозможность торможения привода до его полного останова.
Достоинством режима динамического торможения является его высокая надежность, определяемая тем, что этот режим может осуществляться при исчезновении напряжения питания и в случае выхода из строя источника питания цепи якоря, когда режим рекуперативного торможения становится невозможен. Исходя из этого, динамическое торможение в приводах постоянного тока часто используется в качестве средства аварийного торможения.
Торможение противовключением нехарактерно для двигателей постоянного тока независимого возбуждения. Этот режим может использоваться в приводах малой мощности с широтно-импульсным регулятором тока, позволяющим ограничить ток торможения допустимым значением.
4. 4. Электроприводы по системе «регулируемый источник питания – двигатель постоянного тока»
Для питания двигателей постоянного тока независимого возбуждения используют регулируемые источники питания:
• тиристорный преобразователь (выпрямитель) с фазовым управлением (система ТП – Д);
• полупроводниковые выпрямители с регулированием выпрямленного напряжения методом широтно-импульсного регулирования (ШИР-Д).
а б
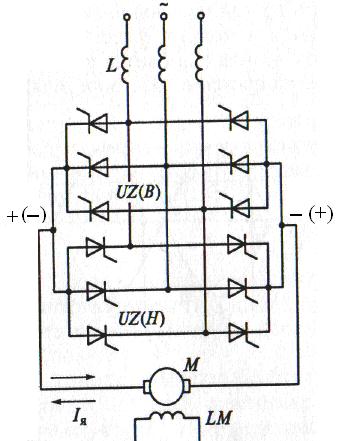
в
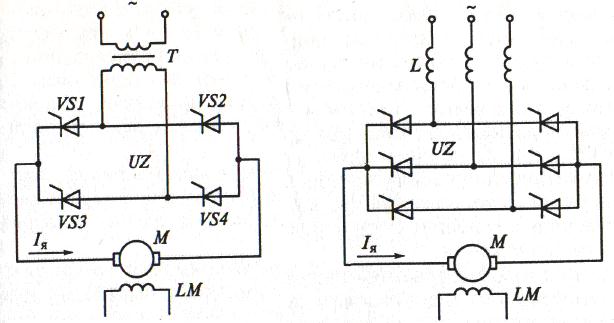
Рис. 9. Силовые схемы электроприводов ТП—Д: а — однофазная мостовая нереверсивная; б — трехфазная мостовая нереверсивная; в — трехфазная мостовая встречно-параллельная реверсивная с раздельным управлением
Основной системой регулируемого электропривода с двигателями постоянного тока является система ТП – Д, наиболее распространенные схемы, которой приведены на рис. 9.
Основу схем тиристорных преобразователей составляют полууправляемые силовые полупроводниковые приборы – тиристоры.
Неполная управляемость тиристоров определяется тем, что включение тиристора контролируется системой импульсно-фазового управления (СИФУ). При подаче отпирающего импульса на управляющий электрод тиристора он открывается и остается открытым после снятия отпирающего импульса. Закрывается тиристор после изменения полярности напряжения анод – катод и спадания тока до нуля. Запирание тиристоров по цепи управления невозможно. Все это относится к однооперационным тиристорам. Существуют запираемые тиристоры, которые допускают запирание по цепи управления. Кроме того существуют преобразователи частоты для электроприводов на полевых транзисторах с полностью изолированным затвором [1 –3].
Ниже приведены марки типовых электроприводов промышленных роботов:
Тип робота Тип электропривода Тип двигателя
тиристорный ;транзисторный
М10П "Кемток" 1ПИ
М20-Ц ЭТЗИ ДК-1
М20П ЭШИМ ЧДПУ-75
М20К8501 этим ЗДПМ; ДПУ-240
М20К8505 ЭПБ-2 2Д8У
М40П ЭШИМ ЗДПМ
тур-ю ЭШИР ПЯ 250; ДПУ-200
ТУР-2,5 ЭШИР ДДЕ
Например, стандартный привод производства Германии АББ DCS400 –- это серия компактных электроприводов постоянного тока нового поколения, рассчитанных на номинальную мощность до 522 кВт. Привод удовлетворяет большинство потребностей машиностроителей, сравним по простоте обращения с аналоговым приводом, обладая при этом всеми преимуществами цифрового, легко встраивается в оборудование, компактен и обладает оптимальным набором функций, прост в установке, настройке и эксплуатации
Область применении: стандартный привод DCS400 можно использовать в различных отраслях промышленности. Среди типичных областей применения можно назвать экструдеры, миксеры, куттеры, волочильные машины, а также прессы. Эти приводы идеальны в тех случаях, когда требуется простота монтажа, пусконаладки и эксплуатации, а также позволяют сэкономить время и исключить ошибки при наладке.
Функции привода:
задатчик скорости с S - образной характеристикой и двумя темпами ускорения – замедления; обратная связь по скорости через тахогенератор, энкодер или по ЭДС якоря двигателя; регулировка скорости двигателя; задание крутящего момента – тока двигателя; внешнее ограничение крутящего момента; регулировка тока; автоматическое ослабление поля; автоматическая оптимизация для тока цепи якоря, тока возбуждения, контроллера скорости, регулятора ЭДС, адаптация потока; монитор скорости; развитая логика управления включением – выключением; дистанционный – местный режим работы; аварийный останов; автоматическое обнаружение последовательности фаз; контроль перегрузки двигателя; функция внутреннего потенциометра двигателя для задания скорости; функция толчкового режима; конфигурируемые макросы приложений.
Управление приводом:
аналоговые и дискретные входы и выходы; последовательные шины связи; программный пакет для ПК; съемная панель управления.
Функции мониторинга:
самодиагностика; диагностика тиристоров; регистратор неисправностей; защита силовой части (от перегрева, от исчезновения напряжения питания).
Контроль состояния двигателя:
обрыв в цепи обратной связи по скорост; перегрев (оценка с помощью PTC - термистора); длительная перегрузка (I2t); превышение заданной скорости; заклинивание вала двигателя; превышение максимально допустимого тока якоря; перенапряжение в цепи якоря; ток возбуждения меньше минимально допустимого; превышение максимально допустимого тока возбуждения.
Семейство комплектных микропроцессорных электроприводов постоянного тока SIMOREG DC MASTER 6RA70 имеет подходящие типы как для высоко комплексных приводных задач, так и для стандартных решений. Приводы высоко динамичны: время возбуждения либо время нарастания вращающего момента находится в пределах до 10 мс. И это в диапазоне мощностей от 6,3 до 2000 кВт для запитки через якорь или внешним магнитным полем, для приводов, работающих в одном или четырех квадрантах.
Диапазон номинальных токов у SIMOREG DC MASTER от 15 до 2000 А и может быть расширен до 10000 А (путем параллельного соединения преобразователей, максимально - 5 блоков); диапазон напряжений - от 400 В до 830 В. Напряжения питающей сети 50/60 Гц
Стандартные функции скоростного электропривода, построенного на современной микропроцессорной базе:
Цифровая система импульсно-фазового управления (СИФУ) реверсивного тиристорного преобразователя цепи тока якоря.
Цифровое построение всех контуров регулирования обеспечивает высокие точность и быстродействие поддержания регулируемых параметров.
Установка параметров может также производиться с помощью персонального компьютера с использованием удобных меню – для быстрого ввода в эксплуатацию, а также для простой визуализации при исполнении SIMOVIS.
Приводы SIMOREG DC MASTER полностью интегрированы в мир автоматизации, подходят для любой системы ЧПУ и прекрасно общаются с другими частями системы независимо от того, произведены ли они фирмой SIEMENS или другими изготовителями.
Дата добавления: 2015-02-09; просмотров: 2605; Мы поможем в написании вашей работы!; Нарушение авторских прав |