КАТЕГОРИИ:
АстрономияБиологияГеографияДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРиторикаСоциологияСпортСтроительствоТехнологияФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Асинхронные электродвигатели
Классификация. Асинхронные двигатели получили широкое применение в качестве электропривода различных механизмов. В настоящее время только в России ежегодно производится около десятка миллионов штук (80 % всех двигателей) асинхронных двигателей по мощности от нескольких ватт до нескольких сот киловат.
Асинхронные двигатели могут быть с вращающимся и бегущим магнитным полем. Двигатели с бегущим магнитным полем называют линейными. По способу возбуждения магнитного поля асинхронные двигатели делятся на трехфазные, двухфазные и однофазные, а по типу обмотки ротора — на двигатели с короткозамкнутой и фазной обмотками. Конструкции роторов с короткозамкнутой и фазной обмотками представлены на рис. 155, а, б; их называют короткозамкнутым и фазным ротором соответственно. Обмотка фазного ротора соединяется в звезду и выводится к контактным кольцам.
При подключении к сети токи обмотки статора и индуцируемые токи обмотки ротора асинхронной машины возбуждают вра щающееся магнитное поле. Часть поля, пересекающего проводники обмоток статора и ротора, называют основным магнитным полем. Часть поля, замыкающегося вокруг проводников либо обмотки статора, либо обмотки ротора, называют полями рассеяния статора и ротора. На рис. 176 представлена упрощенная картина полей рассеяния обмотки статора. Основное магнитное поле машины создается совместным действием мдс статора  и ротора
и ротора  и описывается уравнением магнитного состояния:
и описывается уравнением магнитного состояния:

где  — результирующая мдс.
— результирующая мдс.

Скольжение.Как следует из принципа работы асинхронного двигателя, магнитное поле статора и ротор имеют разную частоту вращения, т. е. вращаются асинхронно. При этом мдс ротора и статора должны оставаться неподвижными друг относительно друга, что является необходимым условием преобразования энергии. Откуда следует, что п1 — n2=ns, где п1 — частота вращения мдс статора; п2 — частота вращения ротора; ns —2 частота вращения ротора относительно поля статора.
При анализе работы асинхронного двигателя пользуются относительной величиной, называемой скольжением:

Обычно скольжение при номинальной мощности равно нескольким процентам. Если ротор заторможен (n2=0), то ns=n1 и s=l.
Основное вращающееся магнитное поле индуцирует в проводниках ротора и статора эдс. Эдс в обмотке статора имеет частоту напряжения сети, а ротора — частоту, равную

Электрическая схема замещения.Действующие значения эдс в фазах обмоток статора и ротора равны
где kоб1 и kоб2 — обмоточные коэффициенты, учитывающие тип обмотки и отличие геометрической суммы эдс проводников от арифметической (kоб<1) -
Поскольку частота эдс ротора зависит от скольжения, то при вращающемся роторе Е2s = sE2, где E2 — действующее значение эдс в фазе неподвижного ротора (при s= 1).
Потоки рассеяния характеризуются соответствующими индуктивными сопротивлениями:
Уравнение электрического состояния фазы обмотки статора имеет вид
 1 = -E1 + jX1İ1+R1İ1.
1 = -E1 + jX1İ1+R1İ1.
Схема замещения фазы обмотки ротора представлена на рис. 177, а, которой соответствует уравнение электрического состояния Ė2s=jX2s+R2İ2.
Действующее значение тока в фазе ротора İ2s и cosψ2s равны
 .
.
Зависимости Х2s, E2s, cosψ2s и I2s от скольжения представлены на рис. 177, б.
ЗАПОМНИТЕ
Уравнения электрического и магнитного состояния асинхронного двигателя аналогичны уравнениям трансформатора. Отличием является то, что частота эдс и тока в роторной цепи отличается от частоты эдс и тока статорной цепи и полезная мощность не электрическая, а механическая.

Поэтому для определения параметров электрической схемы замещения и приведения вторичной (роторной) цепи к статорной необходимо кроме приведения по частоте и числу витков представить механическую мощность на валу двигателя в виде электрической. Такое преобразование достигается, если в цепь ротора включить дополнительный резистивный элемент, значение сопротивления которого Rд определяется из уравнения цепи ротора при делении всех членов на s:

где  или
или  .
.
В этом случае электрическая цепь ротора имеет индуктивное сопротивление Х2 и эдс E2, соответствующие заторможенному ротору.
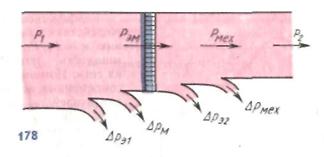
Энергетическая диаграмма асинхронного двигателя представлена на рис. 178.
Из диаграммы следует, что электромагнитная мощность Pэм=Ω1М, передаваемая от статора к ротору, больше механической мощности ротора Рмех=Ω2М на значение магнитных и электрических потерь в роторе. В рабочем режиме электрические потери в роторе много больше магнитных (ΔРэ2>>ΔРм2), поэтому можно записать
или

ЗАПОМНИТЕ
Мощность электрических потерь в роторе асинхронного двигателя пропорциональна скольжению. Полезная мощность на валу двигателя Р2 меньше механической на величину мощности механических потерь.

Коэффициент полезного действия равен отношениюη=Р2/Р1, где Р1 —мощность, потребляемая из сети. Номинальный кпд современных асинхронных двигателей составляет 0,75—0,95.
Вращающий электромагнитный момент двигателя в соответствии с законом электромагнитных сил равен

где ψ2s - фазовый сдвиг тока I2s относительно потока Ф.
Механическая характеристика M(s) асинхронного двигателя, построенная с учетом зависимостей I2s(s) и cosψ2s(s). представлена на рис. 179.
У асинхронных двигателей обычно Mmax/Mпуск=(0,06÷1,5), Mmax/Mн=(1,5÷2). Механическая характеристика может быть представлена электрическими параметрами схемы замещения.
Для уравнения эдс, индуцируемых в обмотках статора и ротора, обмотку ротора заменяют фиктивной обмоткой, имеющей такое же число фаз и витков, что и у обмотки статора. При этом параметры фазы обмотки ротора будут равны:  ;
;  , где
, где  коэффициент приведения.
коэффициент приведения.
Полная и упрощенная схемы замещения фазы асинхронного двигателя приведены на рис. 180, а, б.
Из энергетической диаграммы и схемы замещения (рис. 180, б) имеем
 .
.

Скольжение,при которомасинхронный двигатель развивает максимальный момент Мтax называют критическим

Если подставить полученное значение sкр в выражение для М, то получим значение Мтах

ЗАПОМНИТЕ
Мтах не зависит от сопротивления обмотки ротора R2, а
скольжение sкр зависит от значения R2 На рис. 181, а представлены механические характеристики асинхронного двигателя п(М) при разных значениях сопротивления ротора R2, или при введении в цепь ротора добавочного сопротивления Rд, из которых видно, что при определенном значении активного сопротивления фазы ротора  можно получить Мпуск=Мтах.
можно получить Мпуск=Мтах.
В тех случаях, когда не требуется большой точности для приближенного построения механической характеристики асинхронного двигателя, пользуются упрощенной формулой

Пуск и регулирование частоты вращения.При пуске асинхронного двигателя cosφ очень мал и пусковой ток в обмотке статора может возрастать в 5—7 раз по сравнению с номинальным током Iн, а при частых пусках наблюдается сильный перегрев и выход из строя двигателя.
► Ограничение пускового тока и регулирование пускового момента осуществляются двумя способами: изменением частоты питающего напряжения и увеличением активного сопротивления цепи обмотки ротора в период пуска двигателя.
Семейство механических характеристик асинхронного двигателя при частотном регулировании и приводимого во вращение механизма п(Мт) представлены на рис. 181,б.
Ограничение пускового тока в двигателях с короткозамкнутым ротором осуществляется с помощью глубокопазной обмотки или обмотки в виде двойной «беличьей клетки» (рис. 182,а,б).
Принцип действия двигателя с глубокопазным ротором состоит в следующем.

При пуске, когда частота тока обмотки ротора равна частоте тока обмотки статора, индуктивное сопротивление элементарных проводников в глубине паза оказывается значительным и токи в них практически не возникают. При этом ток вытесняется в верхние слои стержней (рис. 182, а). Площадь активного сечения стержней будет меньше их геометрической площади, что эквивалентно увеличению активного сопротивления фазы обмотки ротора. Таким образом, начальный пусковой момент оказывается увеличенным. По мере возрастания частоты вращения ротора частота токов в его стержнях уменьшается, одновременно с этим снижается и индуктивное сопротивление. При частоте вращения, близкой к номинальной, частота тока в роторе мала, ток в этом случае распределяется практически равномерно по всему сечению стержня, и общее активное сопротивление стержней автоматически уменьшается.
Несколько лучшие пусковые характеристики имеют асинхронные двигатели, роторная обмотка которых выполнена в виде двойной «беличьей клетки».
Регулирование частоты вращения ротора асинхронного двигателя при заданном противодействующем моменте, как . это следует из выражения может быть осуществлено тремя способами: изменением частоты питающего напряжения f1 переключением числа пар полюсов р и изменением скольжения s.

Первый способ регулирования частоты вращения является наиболее перспективным, так как он обеспечивает глубокое, плавное и экономичное регулирование частоты вращения. Однако

для его выполнения требуется специальный источник питания, обеспечивающий U/f = const. В качестве такого источника используют синхронные генераторы с приводом от двигателя постоянного тока. В последнее время для частотного регулирования разработаны статические источники питания на транзисторах и тиристорах.
Регулирование частоты вращения асинхронного двигателя изменением числа пар полюсов осуществляется лишь ступенями.
Регулирование частоты вращения изменением скольжения достигается включением регулировочного резистора в цепь ротора. Недостатком этого способа является увеличение электрических потерь в цепи ротора, которые пропорциональны скольжению Однако этот способ позволяет осуществлять плавную регулировку, поэтому он получил наибольшее распространение.
Однофазный асинхронный двигатель.Однофазный асинхронный двигатель отличается от трехфазного тем, что его обмотка статора подключается к однофазному источнику питания. Ротор однофазного двигателя выполняется короткозамкнутым. В таких двигателях, как правило, на статоре размещается две обмотки оси которых смещены друг относительно друга на электрический угол 90°. Одна из этих обмоток называется рабочей ОВ, а вторая — вспомогательной или пусковой ПО (рис. 183, а). Часто обе обмотки (фазы) выполняют функции рабочей и питаются токами смещенными друг относительно друга по фазе. Такие двигатели по своему устройству являются двухфазными хотя и питаются от однофазной сети.
При подключении одной фазы обмотки статора к сети создается пульсирующий магнитный поток, индуцирующий в обмотке ротора эдс и ток. Возникающие при этом электромагнитные силы, действующие в любой момент времени на неподвижный ротор (его проводники), компенсируют друг друга и, следовательно, не создается начального пускового момента (рис. 183,6). При внешнем воздействии (при малом сопротивлении обмотки ротора) двигатель будет развивать вращающий момент в направлении воздействия.


► Принцип работы однофазного двигателя можно объяснить, используя известный из физики принцип разложения стоячей волны на две, бегущие в разные стороны. При неподвижном роторе оба поля (прямое и обратное) создают одинаковые, направленные встречно, вращающие моменты.
Если ротор под действием внешней силы начал вращаться в прямом направлении (по часовой стрелке), то скольжение (прямое) sпp будет уменьшаться, Мпр — возрастать, .so6p (обратное) — увеличиваться, а Мо6р— уменьшаться (рис. 184, а).
Суммарный электромагнитный момент Мр = Мпр— Мобр>0.
Механическая характеристика однофазного асинхронного двигателя может быть построена как суммарная Мпр=φ!(sпр) и Мобр=φ(sобр). Приэтом, когда sпр= 0, то soop=2.
Если сопротивление обмотки ротора велико и исходные характеристики Мпр(n2) и Мобр(n2) имеют вид, представленный на рис.184, б, то ротор однофазного асинхронного двигателя при получении внешнего воздействия вращаться не будет, так как результирующий момент, действующий на ротор, направлен навстречу действующей внешней силе.
Линейные двигатели.Отдельные механизмы (лифты, насосы, транспортные средства и т. д.) приводятся в возвратно-поступательное движение линейными электрическими двигателями, подвижная часть которых (ротор, бегун) непосредственно с ними связана. Устройство и принцип действия их аналогичны асинхронному двигателю, у которого статор с трехфазной обмоткой развернут в плоскости (плоский статор). Трехфазная обмотка с током сездает магнитное поле, перемещающееся (бегущее) относительно статора со скоростью υ=2τf1, где τ - расстояние между полюсами, f1 — частота тока. Под воздействием бегущего поля статора возбуждаемые им вихревые токи ротора создают электромагнитную силу Fэм в направлении, совпадающем с направлением движения поля статора.
► В линейном двигателе может быть статор длиннее ротора или наоборот. Возможна и другая конструкция двигателя, когда короткозамкнутый ротор неподвижен, а движется статор с обмоткой, возбуждающей бегущее поле. Направление движения изменяется путем переключения последовательности фаз. Недостатком линейного двигателя является искажение магнитного поля в воздушном зазоре и у краев статора, вследствие которых снижаются энергетические показатели (кпд, cosφ).
§ 81. Электрические двигатели малой мощности (микродвигатели)Электрическими двигателями малой мощности обычно называют двигатели мощностью до 500 Вт, приспособленные для привода различных устройств бытовой техники, исполнительных органов систем автоматики, привода специальных приборов, лентопротяжных механизмов, инструмента и т. д.
Кроме обычных двигателей постоянного и переменного тока изготовляют электрические двигатели малой мощности при специальных источниках питания (аккумулятор, однофазная сеть и др.) и необходимости получить заданные рабочие характеристики (пуск, регулирование частоты вращения, надежность в работе, повышенное быстродействие и др.).
Во многих случаях возникает необходимость обеспечить универсальность двигателей, т. е. способность их работы при разных источниках питания, например при питании от трехфазной иоднофазной сети или от постоянного и однофазного переменного тока.
Конструкция и рабочие характеристики асинхронных и синхронных микродвигателей, так же как и двигателей постоянного тока, мало отличаются от обычных двигателей средней и большой мощности.
При питании от однофазного источника переменного напряжения по способу получения вращающегося магнитного поля асинхронные и синхронные микродвигатели делятся на две группы: с фазодвигающим элементом и с экранированными полюсами.
Асинхронные микродвигатели.Такие двигатели могут быть с массивным или полым ротором. Устройство асинхронного микродвигателя с полым ротором представлено на рис. 185.
Статор машины, набранный из листов электротехнической стали, состоит из наружной 1 и внутренней 3 частей. В пазы наружного статора укладываются две обмотки 2, оси которых сдвинуты друг относительно друга на угол 90°. На подшипниках 5 вращается вал 6. В воздушном зазоре между внутренним и наружным статором помещается полый ротор 4, жестко скрепленный с валом. Полый ротор обычно выполняется из сплава алюминия в виде стакана с толщиной стенок 0,3—0,8 мм и толщиной дна 1—2 мм. Воздушный зазор между внутренним и наружным статорами составляет 0,6—1,2 мм. Наличие повышенного почти вдвое по сравнению с обычным асинхронным двигателем воздушного зазора вызывает увеличение тока холостого хода до Ix= (0,8 ÷0,9)Iн.

Внутренний статор служит для уменьшения магнитного сопротивления. В двигателях с полым ротором, мощностью менее 1 —1,5 Вт часто обмотки размещают на внутреннем статоре. В этом случае уменьшаются габариты и масса двигателя.
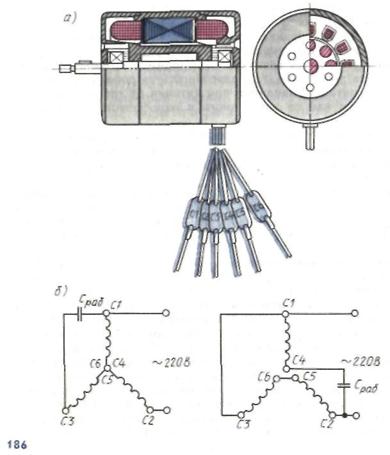
Универсальные асинхронные двигатели(УАД). Универсальные асинхронные двигатели специально рассчитаны для работы как от трехфазной, так и от однофазной сети переменного тока (рис. 186, а). На статоре такого двигателя размещена трехфазная обмотка с шестью выводами. Схемы включения обмотки статора представлены на рис. 186, б.
Синхронные микродвигатели.В зависимости от конструкции ротора синхронные двигатели делятся на двигатели с постоянными магнитами (рис. 187, а), реактивные (рис. 187, б) и гистерезисные (рис. 187, в). Кроме указанных видов применяются тихоходные двигатели с электромагнитной редукцией и шаговые. Последние широко распространены в системах автоматического управления.
Принцип работы реактивного синхронного микродвигателя состоит в следующем. Ротор реактивного двигателя выполняется с явно выраженными полюсами из манитомягкого материала. При подключении реактивного синхронного микродвигателя ксети токи обмотки статора образуют вращающееся магнитное поле, которое, возбуждая в роторе вихревые токи, создает вращающий момент М, слагающийся из электромагнитного Ма (аналогичного моменту асинхронного двигателя) и реактивного М9 (обусловленного неравенством магнитных проводимостей машины по продольной и поперечной осям) моментов. Вращающееся магнитное поле представлено в виде двух вращающихся полюсов магнита (рис. 188, а). Сначала ротор разгоняется до подсинхронной частоты вращения под воздействием асинхронного момента, а затем втягивается в синхронизм под воздействием синхронизирующего реактивного момента.
Механическая характеристика реактивного синхронного микродвигателя представлена на рис. 188, б.
Ротор гистерезисного двигателя (рис. 189, а) представляет собой цилиндр 1 из магнитотвердого материала, расположенный на втулке 2. Принцип работы гистерезисного двигателя состоит в следующем. Вращающееся магнитное поле, образуемое токами обмотки статора, создает в роторе вихревые токи и намагничивает цилиндр. В результате вращающий момент двигателя можно представить как сумму двух моментов: гистерезисного Мг, обусловленного наличием остаточного магнетизма ротора, и асинхронного момента Ма, возникающего от взаимодействия вращающегося момента поля статора с вихревыми токами ротора. Механическая характеристика гистерезисного двигателя приведена на рис. 189, б.

ЗАПОМНИТЕ
Гистерезисный момент М, будет тем больше, чем больше площадь петли гистерезиса магнитотвердого материала ротора
В режиме асинхронной частоты вращения (пуск двигателя) электромагнитная мощность двигателя пропорциональна потерям в роторе (аналогично асинхронному двигателю) и площади петли магнитого гистерезиса материала.
В режиме синхронной частоты вращения Ма = 0 потери в роторе будут только гистерезисные. Следовательно, гистерезисный момент Мг,равный Pэм/Ω, будет тем больше, чем больше площадь петли гистерезиса В(Н) материала.
В реактивно-гистерезисном двигателе вращающий момент равен сумме трех моментов: гистерезисного, реактивного и асинхронного Мдв=Мг+Мр+Ма.

Коллекторные микродвигатели обычно двухполюсные, в конструктивном отношении мало отличаются от двигателей средней мощности.
В настоящее время широкое распространение получили универсальные коллекторные двигатели, предназначенные для работы как от сети постоянного, так и однофазного переменного тока. Эти двигатели имеют только последовательную обмотку возбуждения с дополнительными выводами (рис. 190, а).
При работе на переменном токе включается лишь часть обмотки возбуждения, что позволяет сблизить механические характеристики двигателя при работе на постоянном и переменном токе (рис. 190, б — прерывистая линия). Необходимость дополнительных выводов вызвана тем, что при работе на переменном токе из-за влияния индуктивности обмоток якоря и возбуждения магнитный поток ослабляется. Искрение под щетками, радиопомехи, шум, потери мощности при работе на переменном токе значительно больше, чем на постоянном вследствие ухудшенных условий коммутации.
Преимущество коллекторного двигателя переменного тока по сравнению с асинхронным и синхронным двигателями состоит в том, что он позволяет получить практически любые частоты вращения и путем простых средств обеспечить широкое и экономичное регулирование пускового момента и частоты вращения. Например, при частоте источника питания 50 Гц диапазон регулирования частоты вращения может достигать 3000 -20 000 об/мин.

Шаговые двигатели используются в исполнительных устройствах системы дискретного (импульсного) управления. Они аналогичны многофазным и многополюсным синхронным двигателям. Их ротор и статор выполняются с явно выраженными полюсами. Принцип действия n-фазного шагового двигателя с двухполюсным ротором (рис. 191) состоит в следующем. Если питание обмоток статора осуществляется поочередно (1, 2, 3, ...) однополярными импульсами, то ротор будет иметь т устойчивых положений, которые совпадают с осями полюсов статора.

При импульсном управлении любая обмотка возбуждения по истечении интервала времени действия импульса обесточится. Фиксация положения ротора в интервале между импульсами обеспечивается либо реактивным моментом (ротор намагничен постоянным магнитом), либо специальным электромеханическим фиксирующим устройством.
Дата добавления: 2015-04-16; просмотров: 892; Мы поможем в написании вашей работы!; Нарушение авторских прав |