КАТЕГОРИИ:
АстрономияБиологияГеографияДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРиторикаСоциологияСпортСтроительствоТехнологияФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
ЭЛЕКТРИЧЕСКИЕ СХЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕ -НИЯ ЛИФТАМИ
Лифт является движущейся установкой с относительно сложным электрообо-рудованием. Ею часто управляют пассажиры, не имеющие соответствующей квали-фикации, и их роль при пользовании лифтом должна сводиться к нажатию одной- двух кнопок. Поэтому к схемам управления лифтами предъявляются повышенные требования в отношении надёжности и безопасности пользования. Эти требования особенно высоки в лифтах без проводника с автоматическим приводом дверей, где отсутствует постоянный надзор за работой лифта.
В схемах управления лифтами используется большое число блокировочных аппаратов, предотвращающих неправильное пользование лифтом. Например, при открытых дверях шахты и кабины, открытом верхнем люке кабин, ослабленных кана-тах электропривод отключается и накладывается механический тормоз.
Рассмотрим некоторые типовые схемы управления лифтами.
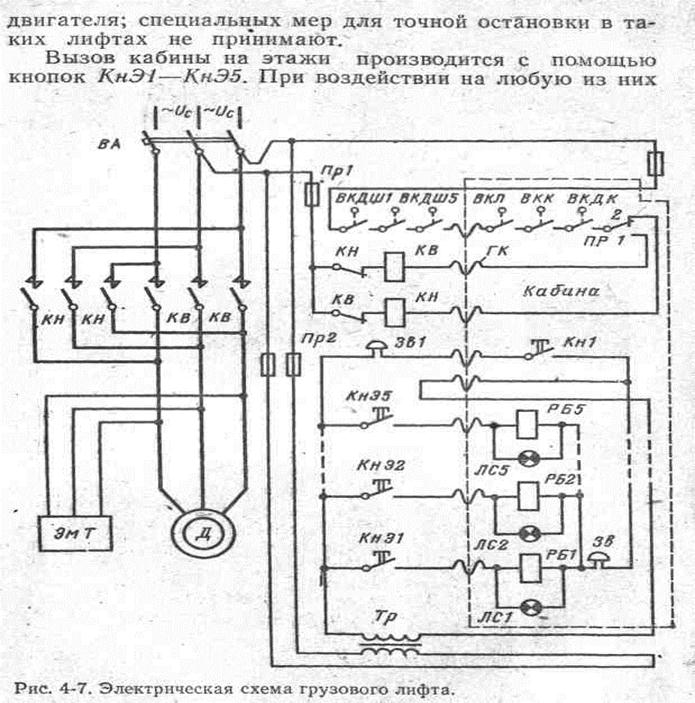
Схема управления грузовым лифтом. Грузовые лифты работают преиму-щественно с проводником при скорости движения 0,25-0,5м/с. Принципиальная электрическая схема такого лифта показана на рис.4-7. Привод осуществляется от асинхронного двигателя с короткозамкнутым ротором Д. Параллельно обмотке ста-тора включён электромагнитный тормоз ЭмТ, колодки которого разжимаются при подаче напряжения на двигатель. Командным аппаратом в схемах удравления таки-ми лифтами является рычажный переключатель ПР (в схеме на рис.4-7 лифт обслу-живает пять этажей).
Для пуска двигателя на подъём или спуск кабины переключатель ПР следует поставить соответственно в положение 1 (или 2). Через контакты дверей шахты ВКДШ-ВКДШ5, контакты конечных выключателей ВКД и ВКК (размыкающихся при срабатывании механизма ловителей при обрыве несущих канатов), контакт дверей кабины ВКДК и гибкий кабель ГК от сети подаётся напряжение на катушку контактора КВ (или КН). После включения контактора КВ(КН) на статор двигателя Д и катушки электромагнитного тормоза ЭмТ будет подано питание, и кабина лифта начнёт двигаться вверх (или вниз).
Для остановки кабины рукоятку переключателя ПР следует поставить в сред-нее положение, что вызывает отключение контактора КВ (или КН) и остановку двигателя. Если кабина по каким-либо причинам не остановилась против уровня этаж-ной площадки, то ее доводку можно произвести путем повторного включения в кабине срабатывает соответствующее указательное реле РБ1—РБ5, включается звонок Зв и загорается соответствующая сигнальная лампочка ЛС1-—ЛС5. Проводник включает привод на.требуемое перемещение кабины. В случае неисправности лифта из кабины в диспетчерскую может быть подан сигнал путем включения звон-ка Зв1 кнопкой Кн1. Для безопасности обслуживания цепи сигнализации лифта под-ключаются к сети через понижающий трансформатор Тр.
Схема управления быстроходным пассажирским лифтом. Электропривод быс-троходного лифта (рис. 4-8,а) осуществляется от двухскоростного асинхронного дви-гателя, имеющего на статоре две раздельные обмотки с соотношением числа полю-сов 6/24 или 6/18, что соответствует синхронным угловым скоростям 104,7/26,2 или 104,7/34,9 рад/с.
В системе привода не предусмотрено ограничение ускорения при пуске, так как при правильном выборе двигателя по мощности Мп,тах<МП, Доп, и пусковые ускорения ап=1-1,2 м/с2 при аДОп=1,5 м/с2. Точная остановка кабины достигается путём перехода с высокой скорости wРаб (включён контактор КБ) на низкую wОСт (включён контактор КМ). При этом будет происходить генераторное торможение, что видно из механических характеристик двигателя, показанных на рис. 4-8,6. При торможении по характеристике 2 МТ,тах>М,ТДоп и ат>адоп. Поэтому для ограничения момента двигателя, а следовательно, и величины аТ в этом режиме в одну из фаз статорной обмотки вводится дополнительный резистор Rд, в двигатель переходит на характе-ристику 2'. После снижения скорости до значения w1 резистор Rд шунтируется, кон-такторам КУ управление которым производится в функций времени. Двигатель пере-ходит на основную характеристику 2, на которой некоторое время работает с остано-вочной скоростью woст, равной начальной скорости wнач для точной остановки.
Управление лифтoм может производиться как из кабины с помощью команд-ных кнопок КнК1 - КнК9 (здание имеет 9 этажей), так и с этажных площадок посредством вызовных кнопок КнВ1-КнВ9. Рассмотрим работу схемы при вызове кабины с 9-го этажа пассажиром,, находящимся на 1-3 этаже. Для этого пассажир должен нажать кнопку КнВ1. Образуется следующая электрическая цепь: контакты кнопки КнС (Стоп) и конечных выключателей дверей шахты ВКДШ1- ВКДШ9, контакты выключателей ловителя ВКЛ и канатов ВКК, контакт дверей кабины ВКДК или контакт пола ВКП1, размыкающие вспомогательные контакты контакто-ров КУ, КВ и КН, контакт пола ВКП2 (этот контакт разрывает цепь кнопок КнВ1-КнВ9 на этаж-

ных площадках, если в кабине находятся пассажиры), контакт кнопки КнВ1, катуш-ка этажного реле РЭ1, контакт этажного переключателя ПЭ1, размыкающий вспомогательный контакт КВ, катушка контактора КН.
По образовавшейся цепи питания включаются контактор КН и этажное реле РЭ1, которые своими замыкающими контактами шунтируют кнопку КнВ1 и подаёт питание на катушку контактора большой скорости КБ по следующей цепи: контакты реле РЭ1 и переключателя скорости ПСН1, контакты выключателя большой скорос-ти ВБ (отключаемого для режимов ревизии и наладки), размыкающий вспомогатель-ный контакт КМ, катушка контактора КБ. Одновременно контактор КН своим замыкающим вспомогательным контактом включает контактор КТ, электромагнит тормоза ЭмТ получает питание и растормаживает двигатель Д.
Силовые контакты контакторов КН и КБ подключают первую обмотку ста-тора Д (большой скорости) к сети, и происходит пуск двигателя по характеристике 1 до скорости wраб. Вслед за включением контактора КБ через его замыкающий вспо-могательный контакт включается контактор отводки КО, который подает напряжеие на электромагнит отводки МО и подготавливает к включению контактор КМ.
Кабина лифта движется вниз и установленной на ней отводкой будет перестав-лять подвижные контакты переключателей ЛСН8—ЛСН2, ПСВ8—ПСВ2 и ПЭ8—ПЭ2 из верхнего положения в нижнее. При подходе кабины к 1-му этажу контакт ПСНГ переводится из верхнего положения в среднее, в результате чего отключается контактор КБ и включается, контактор КМ. К сети подключается вторая обмотка статора двигателя Д с большим числом полюсов (тихоходная). Двигатель начинает тормозиться по характеристике 2' (рис. 4-8,6) и работает в генераторном режиме с введением в одну из фаз статора резистора Rд. Этот процесс контролируется маятниковым реле времени РB пристроенным к контактору KМ. После срабатывания реле РВ включается контактор КУ и шунтирует резистор Rд, осуществляя переход двигателя на основную характеристику 2.
Как только пол кабины приблизится к уровню пола 1-го этажа, переключатель ПЭ1 становится в среднее положение и отключает контакторы КН, КТ, КО, КМ и реле РЭ1. Двигатель отключается от сети, накладывается тормоз и происходит ме-ханическое торможение привода с начальной угловой скорости w0Ст. При отключе-нии контактора КО теряет питание магнит отводки МО и своим выступом упирается в защелку замка шахтной двери на 1-м этаже, что дает возможность пассажирам от-крыть ее.
В схеме на рис. 4-8 показаны цепи сигнализации, указывающей, занята ли ка-бина или свободна, а также цепи аварийной сигнализации.
В рассмотренном лифте процесс открывания и закрывания дверей осущест-вляется вручную, невозможен, приём пассажиров по пути следования кабины, нет сигнализации о перегрузке лифта и т. д. В последние годы стали широко применять-ся пассажирские лифты с автоматическим приводом дверей, в которых отсутствуют -указанные недостатки, что позволяет повысить комфортабельность и производи-тельность лифта. В схемах управления такими лифтами имеются дополнительные узлы, которые выполняют следующие основные логические операции: регистрацию и отработку вызовов и приказов, выбор направления движения, обеспечение вклю-чения двигателей дверей и подъёма, точную остановку кабины, различного рода сигнализацию. Последовательность работы узлов привода устанавливается прог-рамммой, осуществляемой схемой автоматического управления. При поступлении в схему соответствующего сигнала, например на движение, вначале срабатывает при-вод дверей и подготавливает кабину к движению. Затем включается электропривод подъёма, обеспечивая движение кабины с высокой скоростью, а также переход на малую скорость при подходе ее к требуемому этажу. После остановки кабины снова включается привод дверей, но уже на их открывание. В схеме может быть предусмотрено также выполнение попутных вызовов при движении кабины вниз. В случае движения загруженной кабины вверх вызовы не принимаются. При дви-жении кабины с пассажирами и наличии нескольких зарегистрированных приказов остановка происходит на ближайшем по направлению движения этаже. Такие схемы управления лифтами описаны в [6,21].
Дата добавления: 2014-11-13; просмотров: 1390; Мы поможем в написании вашей работы!; Нарушение авторских прав |