КАТЕГОРИИ:
АстрономияБиологияГеографияДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРиторикаСоциологияСпортСтроительствоТехнологияФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
АВТОМАТИЗАЦИЯ ДОЗИРОВАНИЯ КОРМА И УЧЕТА ПРОДУКЦИИ
Особенность рассмотренных в этой главе устройств — их непригодность для индивидуальной раздачи кормов. В то же время индивидуальная раздача кормов, особенно концентрированных, имеет большие преимущества, такие, как экономный расход корма и увеличение продуктивности животных на 10.... 15 %. Наиболее распространена индивидуальная раздача кормов на доильной площадке.
Существуют также системы раздачи кормов в коровниках с использованием специальных автоматических кормовых станций. Управление этими системами может быть ручное, программное или автоматическое. Системы дозирования кормов в местах содержания животных рекомендуются для высокопродуктивных коров. С помощью автоматической кормовой станции можно организовать выдачу концентрированных кормов небольшими дозами в течение суток, когда животное само подходит к кормушке (кормовой станции).
Очевидно, индивидуальная раздача кормов требует выполнения ряда условий: идентификация животного, измерение его продуктивности и наличие управляемого дозирующего устройства.
Автоматическая идентификация животного.Ее осуществляют с помощью радиотехнического устройства — датчика, закрепляемого в ухе или на специальном ошейнике (рис. 11.6, а). Наиболее
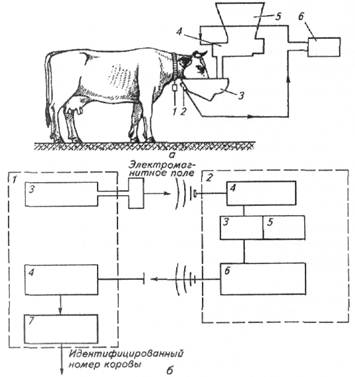
Рис. 11.6. Автоматизированная система индивидуального кормления КРС:
а —технологическая схема системы: 1 — трансподер; 2— приемно-передающее устройство; 3 — кормушка; 4— дозатор; 5—бункер; 6— микроЭВМ; б — функциональная схема: 1—идентифицирующее устройство; 2 — транспортер; 3 — генератор электромагнитных волн; 4 — приемное устройство; 5 — блок памяти; 6— передающее устройство; 7— декодирующее устройство
Наиболее удачной конструкцией такого датчика является трансподер, объединяющий в одном корпусе приемное и передающее устройства (рис. 11.6,6). Питание схемы трансподера осуществляется через приемную ферритовую антенну от генератора, входящего в состав идентифицирующего устройства. Передающее устройство вырабатывает последовательность импульсов в соответствии с индивидуальным кодом, заложенным в памяти трансподера. Этот сигнал излучается передающим устройством на фиксированной частоте, принимается идентифицирующим устройством, декодируется и используется управляющим устройством системы автоматического кормления в качестве идентификатора животного.
Автоматическое измерение продуктивности животного. Оно может быть выполнено различными устройствами, в том числе устройством, действующим на принципе автоматического дозатора молока, описанного далее.
Более совершенная конструкция молокомера представляет собой сосуд, подвешенный на тензометрическом силоизмерителе. Этот принцип измерения удоя не имеет недостатков, свойственных измерителям объемного типа, — погрешности, вызванной изменением плотности молока из-за его вспенивания, и температурной погрешности. Недостатки конструкции — сложность очистки при промывке доильной установки и необходимость корректировки схемы силоизмерителя.
Автоматическое дозирование корма. В зависимости от уровня автоматизации процесса дозирования управление дозаторами может быть ручное, полуавтоматическое или автоматическое. При ручном управлении процессом дозирования командует оператор. При полуавтоматическом дозировании оператор использует счетчики порций, устройства для подачи корма в дозатор и другие вспомогательные механизмы. При полной автоматизации процесса дозаторы работают по разомкнутому циклу, выполняя функции ИМ, отмеряющих заданное количество корма независимо от изменения его параметров, или по замкнутому циклу, когда изменение выдачи материала происходит в соответствии с командой регулирующего устройства.
Конструкция дозаторов зависит от вида дозируемого корма. Для дозирования сухих рассыпных кормов применяют барабанные, тарельчатые, ленточные и шнековые дозаторы.
В барабанном дозаторе рабочим органом является ячеистый барабан, состоящий из нескольких звездочек 1 (рис. 11.7, а), разделенных дисками 2. Форма поперечного сечения звездочек зависит от физико-механических свойств корма. Побудитель 3 обеспечивает равномерное распределение корма по образующей барабана. Объем выдаваемого продукта прямо пропорционален частоте вращения барабана.
Тарельчатый дозатор работает следующим образом. Корм поступает в приемный бункер 1 (рис. 11.7, б) дозатора, в конической
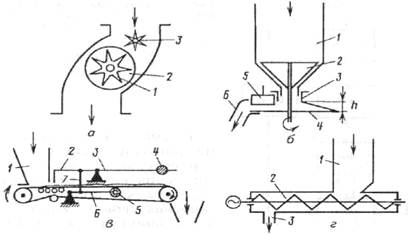
Рис. 11.7.Схемы дозаторов концентрированных кормов:
а — барабанный: 1 — звездочка; 2 —диск; 3 — побудитель расхода; б — тарельчатый: 1 — бункер; 2 — рыхлитель; 3—ПОДВИЖНЫЙпатрубок; 4— вращающийся диск; 5— скребок; б—отводный лоток; в —ленточный:1 — приемный ковш; 2 —регулирующий элемент; 3 — коромысло; 4 — груз; 5— ролик; б—рычаг; 7—тяга; г— шнековый: 1 — приемный бункер; 2 — рабочий винт; 3— выгрузное отверстие
Тарельчатый дозатор работает следующим образом. Корм поступает в приемный бункер 1 (рис. 11.7, б) дозатора, в конической части которого вращается рыхлитель 2. В нижней части бункера 1 установлен подвижной патрубок 3, положение которого определяет интенсивность поступления корма на вращающийся диск 4. При вращении диска скребок 5сбрасывает корм в отводной лоток 6. Производительность дозатора регулируют, перемещая подвижной патрубок и скребок или изменяя частоту вращения диска.
Ленточный дозатор предназначен для непрерывного дозирования по объему или массе. Дозируемый корм поступает в приемный ковш 1 (рис. 11.7, в), из которого вытекает на ленту транспортера слоем, толщина которого устанавливается автоматически с помощью шибера, закрепленного на коромысле Свесов с грузом 4. Лента транспортера опирается на ролик 5. При увеличении нагрузки на ленту ролик 5опускается и через систему рычаг 6— тяга 7 воздействует на коромысло 3 весов, уменьшая толщину слоя корма на ленте дозатора. Возможные способы регулирования производительности — перемещение груза 4 по коромыслу 3 весов или изменение скорости движения ленты.
 Шнековый дозатор работает по принципу объемного дозирования. Корм поступает в приемный бункер 1 (рис. 11.7, г) и перемещается рабочим винтом 2 к выгрузному отверстию 3. Производительность шнекового дозатора регулируют, изменяя частоту вращения винта.
Шнековый дозатор работает по принципу объемного дозирования. Корм поступает в приемный бункер 1 (рис. 11.7, г) и перемещается рабочим винтом 2 к выгрузному отверстию 3. Производительность шнекового дозатора регулируют, изменяя частоту вращения винта.
Рис. 11.8. Функциональная схема системы автоматической настройки дозатора. Условные обозначения:
УУ— устройство управления; УОКР — устройство оценки качества работы; ММ — математическая модель; УКП— устройство коррекции параметров ММ
Рассмотренные устройства, кроме ленточного дозатора с весоизмерительным устройством, не обеспечивают постоянной производительности при изменении физических свойств корма. С этой целью применяют автоматическую настройку дозатора по его математической модели (рис. 11.8). Команда на изменение производительности дозатора отрабатывается на его математической модели {ММ), и перенастройка дозатора происходит с помощью управляющего устройства (УУ). Специальное устройство (УОКР) оценивает качество работы дозатора (например, по массе дозируемого корма) и постоянно корректирует параметры его математической модели. В случае необходимости перенастройка дозатора может быть проведена по команде СУ более высокого уровня.
Автоматическое взвешивание животных.Периодическое взвешивание животных (особенно свиней) — необходимое условие постоянного контроля процесса откорма. Однако обычные пружинные весы не дают точного результата, поскольку животные ведут себя беспокойно и стрелка весов не устанавливается.
Существуют системы полуавтоматического взвешивания, обслуживаемые одним человеком. Дверцы, управляемые автоматически, направляют животных в весовую клеть. Сигнал от силового элемента весовой клети дешифрируется и усредняется в течение 2...3 с, после чего выводится на табло. Точность измерения (± 1 %) достаточно высокая, если учесть, что в течение дня масса свиньи изменяется на 5 % (потребление корма, дефекация и т.д.). Коров можно взвешивать в движении, поскольку имеется регулярная схема их перемещения, связанная с доением. При этом животное идентифицируется и результаты взвешивания выводятся на печать.
Длину весовой клети выбирают такой, чтобы на ней поместилось только одно животное. Если же на платформе оказывается два животных, то результат измерения не учитывают.
Дата добавления: 2015-01-19; просмотров: 726; Мы поможем в написании вашей работы!; Нарушение авторских прав |