КАТЕГОРИИ:
АстрономияБиологияГеографияДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРиторикаСоциологияСпортСтроительствоТехнологияФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Преобразование декартовых координат.
Известно, что положение точки М некоторого пространства V можно однозначно определить, задав координаты x, y и z этой точки относительно некоторой системы координат OXYZ. Выбор системы координат – произвольный. Очевидно, что в одной системе координат XOYZ точка М будет иметь координаты М(x; y; z), а в другой системе X’O’Y’Z’ точка М будет иметь другие координаты М(x’; y’; z’). Естественно возникает задача: зная координаты точки М в одной системе координат, выразить через них координаты той же точки М относительно другой системы.
Задача сводится к нахождению трех функций:

позволяющих однозначно определить координаты точки М относительно одной системы координат, зная их относительно другой системы. Если системы XOYZ и X’O’Y’Z’ - прямоугольные декартовы системы координат, то формулы перехода от одной системы координат к другой системе имеют вид:

где точка  - начало координат новой системы X’O’Y’Z’;
- начало координат новой системы X’O’Y’Z’;  - направляющие косинусы углов, составленных единичными векторами новой и старой систем координат. Если система координат определена на плоскости, то формулы преобразования имеют вид:
- направляющие косинусы углов, составленных единичными векторами новой и старой систем координат. Если система координат определена на плоскости, то формулы преобразования имеют вид:
 .
.
Если  , то есть начало новой системы координат совпадает с началом старой системы, то формулы преобразования имеют вид:
, то есть начало новой системы координат совпадает с началом старой системы, то формулы преобразования имеют вид:
и определяют поворот системы.
Если единичные векторы старой и новой систем коллинеарны, то получим преобразование параллельного переноса:
На плоскости преобразования поворота и параллельного переноса имеют вид: 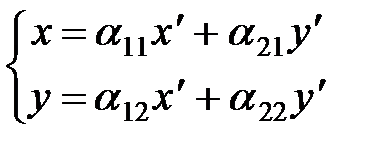

Общее преобразование можно рассматривать как суперпозицию параллельного переноса и поворота системы координат. Справедливо фундаментальное утверждение: каковы бы ни были две произвольные прямоугольные декартовы системы координат, координаты x, y, z любой точки пространства относительно одной системы являются линейными функциями координат x’, y’, z’ той же точки относительно другой системы.
Дата добавления: 2015-04-15; просмотров: 322; Мы поможем в написании вашей работы!; Нарушение авторских прав |