КАТЕГОРИИ:
АстрономияБиологияГеографияДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРиторикаСоциологияСпортСтроительствоТехнологияФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Новая классификация форм механического движения
При рассмотрении любого движения (в том числе, механического) в основу классификации видов движений должны быть положены свойства выбранных координат состояния форм движения. Поэтому форм механического движения должно быть тоже три, но они другие (см. рисунок): 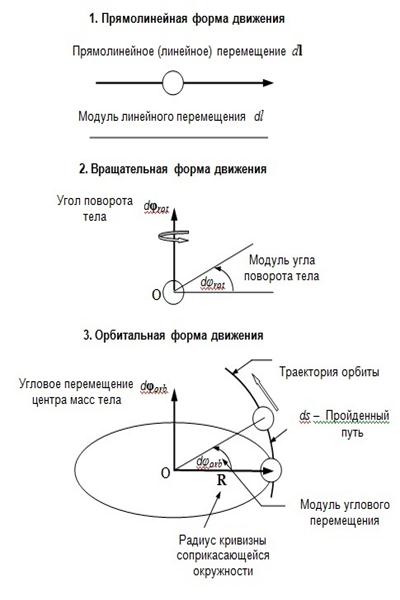
1. Прямолинейная форма движения тела, координатой состояния которой являетсялинейное перемещение центра масс тела dl. Прямолинейная форма движения тела − это предельный случай вращательной формы движения при кривизне траектории, стремящейся к нулю.
Можно, конечно, создать экспериментально с высокой степенью точности прямолинейное движение, можно найти и в природе примеры движения, очень близкого к прямолинейному. Но природа к этому не стремится, скорее наоборот.
2. Вращательная форма движения тела, координатой состояния которой является аксиальный вектор угла поворота dφrot . Эта форма движения относится только к вращению тела в целом. При рассмотрении этой формы движения не рассматривается самостоятельное движение отдельных частей тела, и ось вращения считается проходящей через неподвижный относительно системы отсчета центр масс. По этой причине говорить следует только об угле поворота тела.
3. Орбитальная форма движения тела по криволинейной траектории, каждая из точек которой имеет свой радиус кривизны R, равный радиусу окружности, соприкасающейся с этой точкой. Эта форма движения даже в простейшем случае, когда центр соприкасающейся окружности О совмещается с центром системы отсчета, состоит из сочетания 4-х форм движения: двух прямолинейных (движения вдоль радиуса кривизны и перпендикулярно к нему) и двух вращательных (вращения движущегося тела вокруг собственного центра вращения и вращения радиуса кривизны вокруг центра кривизны О). Соответственно, имеются и 4 координаты состояния.
При движении тела по орбите линия действия аксиального вектора угла поворота тела dφrot проходит через центр вращения движущегося тела. А через центр кривизны траектории проходит аксиальный векторуглового перемещения dφorb радиуса кривизны траектории. Перемещение центра масс движущегося телаdr становится векторной суммой элементарных перемещений различных прямолинейных форм движения, составляющих орбитальное движение тела. В более сложном случае следует учитывать, что сам центр кривизны О может двигаться по собственной криволинейной траектории.
Дата добавления: 2015-01-19; просмотров: 346; Мы поможем в написании вашей работы!; Нарушение авторских прав |