Принципы построения систем векторного частотно-токового управления асинхронным двигателем.
Система векторного управления асинхронным электроприводом в наиболее общем случае должна решать задачи регулирования и стабилизации момента и скорости двигателя.
  Формирование момента АД в соответствии с (4.40), (4.42) возможно за счет воздействий на абсолютные значения векторов потокосцеплений токов и фазовых сдвигов между ними. От того, какие вектора выбраны в качестве регулируемых будет зависеть принцип построения и техническая реализация системы управления электроприводом. Формирование момента АД в соответствии с (4.40), (4.42) возможно за счет воздействий на абсолютные значения векторов потокосцеплений токов и фазовых сдвигов между ними. От того, какие вектора выбраны в качестве регулируемых будет зависеть принцип построения и техническая реализация системы управления электроприводом.
  Если воспользоваться уравнением 1 соотношения (4.42), то в качестве регулируемых будут выбраны вектора и . Их диаграммы в соответствии с рис. 4.7 выделены на рис. 7.1, а . Здесь же приведены вектора токов намагничивания Im , ротора I'2 и даны проекции векторов тока статора и ротора на осиx, y. Анализ рис. 7.1, а позволяет интерпретировать АД как эквивалентную машину постоянного тока. Если воспользоваться уравнением 1 соотношения (4.42), то в качестве регулируемых будут выбраны вектора и . Их диаграммы в соответствии с рис. 4.7 выделены на рис. 7.1, а . Здесь же приведены вектора токов намагничивания Im , ротора I'2 и даны проекции векторов тока статора и ротора на осиx, y. Анализ рис. 7.1, а позволяет интерпретировать АД как эквивалентную машину постоянного тока.
Если ротор АД сопоставить якорю двигателя постоянного тока (ДПТ), а статорные обмотки – обмоткам возбуждения ДПТ, то составляющая тока статора I1х,синфазная потокосцеплению , может интерпретироваться как ток возбуждения ДПТ, составляющая I1у – как ток его компенсационной обмотки, составляющая I2у – как поперечная составляющая поля якоря ДПТ , составляющая I2х – как размагничивающая продольная реакция якоря. Из рис. 4.1, а видно, что потокосцепление определяется током
  и, следовательно, в системе координат x, y, связанной с вектором потокосцепления , составляющие I1у и I2у равны и имеют разные знаки, а встречно направленные составляющие I1х и I2х определяют модуль потокосцепления и, следовательно, в системе координат x, y, связанной с вектором потокосцепления , составляющие I1у и I2у равны и имеют разные знаки, а встречно направленные составляющие I1х и I2х определяют модуль потокосцепления
.
 В приведенной интерпретации отличительные особенности АД от ДПТ в том, что на статоре АД нет отдельно эквивалентной обмотки возбуждения и компенсации поперечной реакции якоря (эти обмотки как бы совмещены), а ось х, связанная с потокосцеплением вращается относительно статора со скоростью . В приведенной интерпретации отличительные особенности АД от ДПТ в том, что на статоре АД нет отдельно эквивалентной обмотки возбуждения и компенсации поперечной реакции якоря (эти обмотки как бы совмещены), а ось х, связанная с потокосцеплением вращается относительно статора со скоростью .
 Эти особенности формирования момента по (4.42) определяют основные положения при технической реализации системы векторного управления. Так вектор может быть определен измерением с помощью датчиков Холла его составляющих Yma и Ymbна неподвижные относительно статора оси a и b (рис. 4.1), как Эти особенности формирования момента по (4.42) определяют основные положения при технической реализации системы векторного управления. Так вектор может быть определен измерением с помощью датчиков Холла его составляющих Yma и Ymbна неподвижные относительно статора оси a и b (рис. 4.1), как
. При этом модуль потокосцепления
  , а угол между осями a, b неподвижной системы координат и осями x, yсистемы координат, вращающейся со скоростью , а угол между осями a, b неподвижной системы координат и осями x, yсистемы координат, вращающейся со скоростью
j0.эл = arccos (Yma/ êYmê).
  Составляющие вектора в системе координат a, b могут быть определены через токи фаз статора IА, IВ,IС как [1] Составляющие вектора в системе координат a, b могут быть определены через токи фаз статора IА, IВ,IС как [1]
; .
  В системе координат x, yпроекции вектора тока I1a и I1b определяются как [8] В системе координат x, yпроекции вектора тока I1a и I1b определяются как [8]
; . (7.1)
Они представляются сигналами постоянного тока и не зависят от частоты питания АД. Учитывая это, система векторного управления может строиться аналогично системам управления двигателями постоянного тока, где составляющая I1xтока статора определяет потокосцепление ym АД (магнитный поток ДПТ), а составляющая I1уявляется моментной составляющей тока статора (подобна току якоря ДПТ).
Таким образом система векторного управления с опорным вектором потокосцепления ymдолжна иметь два канала управления: канал управления модулем ym и канал управления угловой скорости ротора АД. По аналогии с ДПТ канал управления скоростью должен содержать внутренний контур управления составляющей тока статора I1у, эквивалентной току якоря ДПТ, и внешний контур управления угловой скоростью ротора. Канал управления модулем потокосцепления ym должен содержать контур управления составляющей тока статораI1x , эквивалентной току возбуждения ДПТ. Хотя по своей функции этот канал и подобен каналу управления магнитным потоком ДПТ, он более сложен, поскольку взаимосвязь модуля ym, составляющих тока и напряжения статорапо оси х характеризуется дифференциальными уравнениями второго порядка. На этот канал оказывает влияние и составляющая тока статора I1у в виде трансформаторных ЭДС, пропорциональных рассеяниям статора и ротора [8].
Важной особенностью системы управления с опорным вектором потокосцепления ym является возможность его прямого измерения с помощью датчиков, установленных в воздушном зазоре АД. Подобные системы имеют более высокие показатели качества управления по сравнению с системами, где используется косвенный (расчетный ) путь определения сигналов обратных связей.
При стабилизации потокосцепления ротора (при Y2 =const) механические характеристики АД подобны характеристикам ДПТ независимого возбуждения (4.4.4). Поскольку теория и технические решения замкнутых систем управления электроприводом с ДПТ независимого возбуждения достаточно апробированы, то понятна привлекательность применения систем векторного управления с управлением по потоку ротора.
      Векторная диаграмма токов и потокосцеплений АД при стабилизации потокосцепления ротора приведена на рис. 7.1, б.Здесь ось х совмещена с вектором . При этом ; ; I'2х = 0; I'2у = - Y2w0нsа / R'2, т.е. в установившемся режиме вектор токаротора перпендикулярен вектору , а составляющие тока статора Векторная диаграмма токов и потокосцеплений АД при стабилизации потокосцепления ротора приведена на рис. 7.1, б.Здесь ось х совмещена с вектором . При этом ; ; I'2х = 0; I'2у = - Y2w0нsа / R'2, т.е. в установившемся режиме вектор токаротора перпендикулярен вектору , а составляющие тока статора
; , (7.2)
 где - электромагнитная постоянная времени цепи ротора. где - электромагнитная постоянная времени цепи ротора.
В двигательном режиме (sa>0 )вектор тока статора
 (7.3) (7.3)

опережает вектор на угол . (7.4)
При этом вектор тока ротора отстает отна угол 90 эл. град. и при Y2 = const модуль тока ротора меняется пропорционально абсолютному скольжению.
Из (7.2) – (7.4) следует, что конец вектора скользит вдоль прямой 2, перпендикулярной вектору (рис. 7.1, б). При этом составляющая I1xопределяет потокосцепление Y2 , а I1укомпенсирует влияние на него реакции ротора.
  Результирующая составляющая токов статора и ротора по оси у создает составляющую потокосцепления . При этом конец вектора будет скользить по прямой 3, перпендикулярной вектору . Аналогично годограф вектора характеризуется прямой 4 (рис. 7.1, б). Результирующая составляющая токов статора и ротора по оси у создает составляющую потокосцепления . При этом конец вектора будет скользить по прямой 3, перпендикулярной вектору . Аналогично годограф вектора характеризуется прямой 4 (рис. 7.1, б).
В соответствии с уравнением 5 системы (4.36) электромагнитный момент АД определяется взаимодействием ортогональных составляющих потокосцепления ротора Y2 = Y2х = LmI1xи тока статора I1y.Таким образом, при стабилизации Y2 , как и при стабилизации Ym , система векторного управления будет подобна системам управления двигателями постоянного тока, где составляющая I1xтока статора определяет потокосцепление Y2 АД (магнитный поток ДПТ), а составляющая I1уявляется моментной составляющей тока статора (подобна току якоря ДПТ).
| а) б)
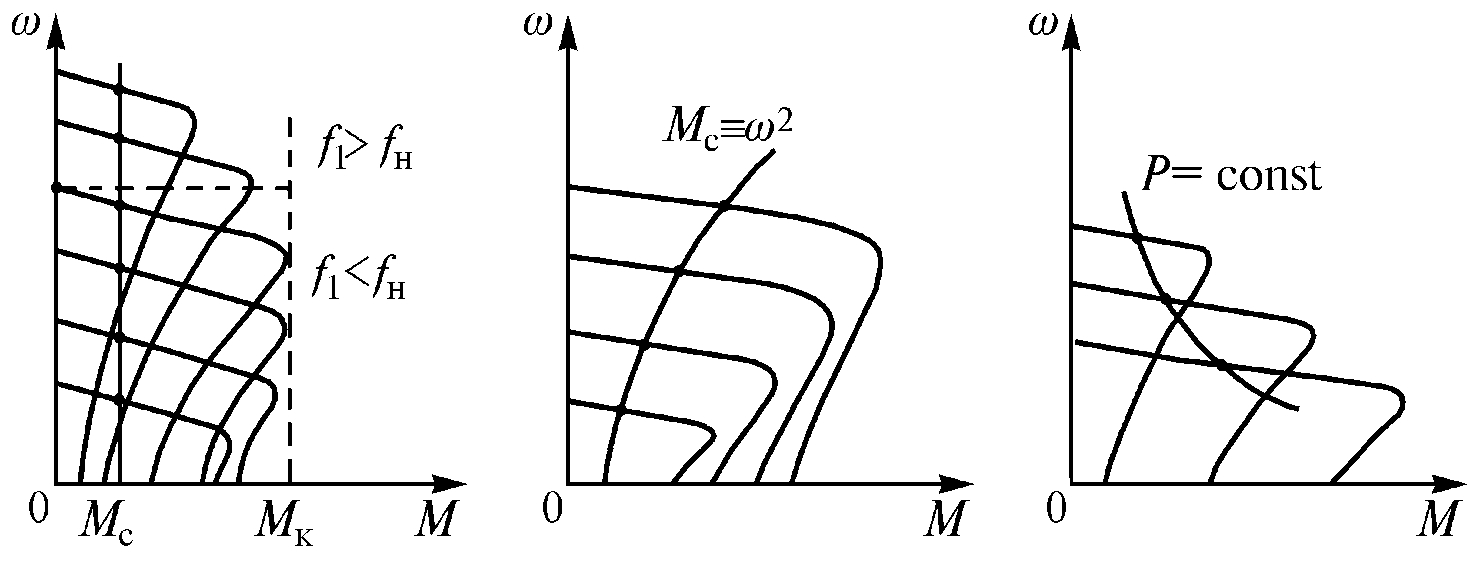
Рис.4.1. Механические характеристики АД при частотном регулировании
|
Рис.4.7. Векторные диаграммы АД при частотном регулировании для двигательного
режима (а) и режима рекуперативного торможения (б)
| - -
E¢2= -jymw0н ×sa
- -
E¢2= -jy2w0н ×sa
|
|
а) б)
Рис.7.1. Векторные диаграммы АД при ориентации по потокосцеплениям ym (а) и y2 (б)
|
|