КАТЕГОРИИ:
АстрономияБиологияГеографияДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРиторикаСоциологияСпортСтроительствоТехнологияФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
ОСНОВНЫЕ И ВСПОМОГАТЕЛЬНЫЕ ДВИЖЕНИЯ В СТАНКАХ, КИНЕМАТИЧЕСКИЕ СХЕМЫ
Процесс получения на станках деталей определенной формы поверхности и размеров состоит в снятии с заготовки липшеего металла инструментом, режущая кромка которого перемещается относительно заготовки. Необходимое относитель-ное перемещение создается в результате сочетания движений инструмента и заго-товки. Они называются основными или, рабочими движениями. Их разделяют на главное (режущее) д в и ж е н и е (за счет него инструмент производит резание металла) и движение п о д а ч и, которое служит для перемещения инструмента или обрабатываемой заготовки (в зависимости от типа станка) для снятия слоя металла с целью придания детали определенной формы.
В зависимости от вида обработки основные движения могут иметь различный характер. Так, при строгании сочетаются поступательное движение детали или инс-трумента (движение резания) и перпендикулярное к нему поступательное движение инструмента (подачи); при токарной обработке происходит вращение заготовки и поступательное движение инструмента (см.рис.7-3); фрезерование осуществляется путём сочетания вращательного движения инструмента и поступательного движе-ния заготовки; при сверлении оба основных движения совершает инструмент.
Главные движения в станках осуществляются при помощи электроприводов (применяются и гидроприводы), движения подачи - либо через механическую передачу от главного привода, либо от отдельных электро- или гидроприводов.
Кроме основных движений в станках имеются вспомогательные движения. Они непосредственно не участвуют в процессе резания, но необходимы для обработ-ки изделий, например: для установки инструмента, автоматического подвода его к заготовке и обратного отвода, контроля размеров в процессе обработки, подачи смазки и охлаждающей жидкости и т. д.
 |
Передача движений в станках от двигателей к рабочим органам осущест-
Передача движений осуществляется кинематическими цепями механизмов станка. Структуру этих цепей, их взаимные связи и особенности можно проследить по кинематической схеме станка.По такой схеме легко рассчитываются ско-рости движения рабочих органов станка или, наоборот, по заданным скоростям дви-жения рабочих органов находятся требуемые значения угловой скорости двига-телей. Кинематическая схема нужна также для определения моментов,действующих на валу двигателя, КПД и т.п.
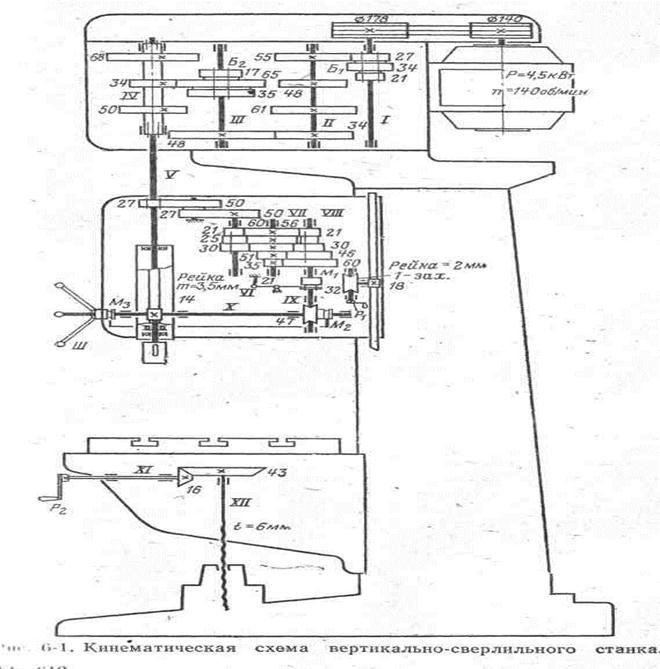
В качестве примера рассмотрим кинематическую схему вертикально-свер-лильного станка 2А135. Главное движение станка - вращение шпинделяV(рис.6-1). Движение от двигателя через клиноременную передачу /0140 - /0178 передаётся на вал 1 коробки скоростей, на котором находится тройной подвижный блок Б1 обеспечивающий валу 11 три частоты вращения.От вала 11 через шестерни 34-48 вращение передается валу 111, на нём расположен тройной подвижный блок 1 шестерен Б2, приводящий в движение полый вал IV ,связанный шлицевым соеди-нением со шпинделем V, который имеет девять частот вращения. Частота вращения
|
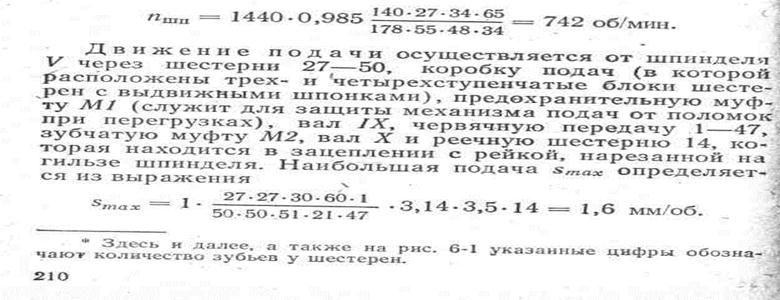
шпинделя при соединении шестерён, указанных на рис.6-1, с учётом упругого скольжения ремня передачи:
В с п о м о г а т е л ь н ы е движения производятся вручную. Перемещение шпиндельной бабки осуществляется от рукоятки Р1 через червячную передачу 1-32 и реечную шестерню 18, сцеплённую с рейкой т=2мм, закреплённой на станине. Вер-тикальное перемещение стола производится посредством рукоятки Р2 через вал XI, конические шестерни 16-43 и ходовой винт XII. Быстрое перемещение шпинделя с гильзой достигается поворотом штурвала Ш, связанного специальным замком с валом X. Замок позволяет штурвалу свободно поворачиваться на валу X в пределах 20°, а при больших углах поворота - связывает их в одно целое.
ОБЩИЕ ВОПРОСЫ ЭЛЕКТРОПРИВОДА СТАНКОВ
Требования к электроприводам основных и вспомогательных движений. Одним из важнейших вопросов электрооборудования металлорежущих станков яв-ляется выбор типа электропривода для основных движений. На этот выбор оказы-вает влияние ряд факторов: 1) диапазон и плавность регулирования скорости рабо-чего механизма; 2) характер нагрузки привода; 3) частота включений привода; 4) соотношение периодов машинного и вспомогательного времени работы станка; 5) энергетические показатели работы привода - КПД и коэффициент мощности; 6) на-дёжность привода, простота его обслуживания и наладки.
Регулирование скорости приводов главного движения станков производится в диапазоне от (3-6) до (100-120) : 1 и может быть осуществлено одним из следую-щих способов: 1) механическим - изменением передаточного отношения от дви-гателя к рабочему органу станка; 2) электрическим - изменением частоты вра-щения двигателя; 3) электромеханическим - комбинированием двух первых спосо-бов. При этом механическое регулирование, как правило, является ступенчатым, а электрическое может быть ступенчатым и бесступенчатым.
Механические характеристики электродвигателей главных приводов должны быть жёсткими. Перепад угловой скорости при изменении нагрузки валу двигателя от холостого хода до номинальной н должен превышать 5-10%.
Выбор типа двигателей для станков. Для современного станкостроения характерно стремление приблизить двигатель к рабочему органу станка, это позво-ляет упростить кинематические цени, снизить потери в передачах и сделать привод более компактным, что в свою очередь ведет к органическому слиянию электри-ческой и механической частей станка. Это обстоятельство привело к применению на станках кроме двигателей нормального исполнения со станиной на лапах, двига-телей специального исполнения со станиной без лап, имеющих фланец на подшип-никовом щите. На рис.6-3 показаны условные обозначения различных форм испол-нения двигателей на кинематических схемах станков. Применение фланцевых двига-телей, которые могут устанавливаться непосредственно на основание станка как го-ризонтально, так и вертикально, позволяет в ряде случаев упростить конструкцию станка, например, за счёт изъятия конических шестерён, служащих для сочленения взаимно перпендикулярных валов, и осуществить более компактную встройку двига-теля в станок.
Приводные двигатели станков должны быть защищены от вредного влияния окружающей среды (попадании в них машинного масла, эмульсии, металлической и абразивной пыли и др.). Если при работе станка не образу
Дата добавления: 2014-11-13; просмотров: 1242; Мы поможем в написании вашей работы!; Нарушение авторских прав |