КАТЕГОРИИ:
АстрономияБиологияГеографияДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРиторикаСоциологияСпортСтроительствоТехнологияФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Настройка модели, расчет и анализ
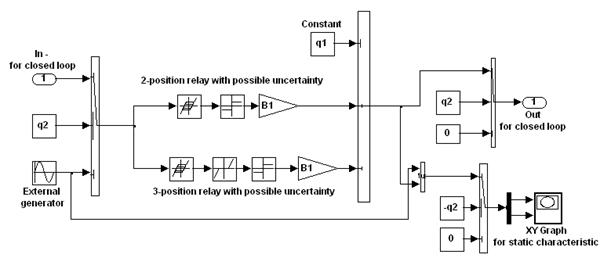
S-модель исследуемой системы представлена на рис. 1.2, а внутренняя структура некоторых ее блоков изображена на рис. 1.3.
1. При выполнении работы следует вначале изучить работу нескорректированной системы. Для этого:
· Установите значения вспомогательных переменных в окне блока нелинейного звена так, что они задают реализацию двухпозиционного идеального реле (ширина полевой зоны гистерезиса e=0). Задайте значение параметра q2, позволяющее получить график статической характеристики.
· Изменив значение параметра q2, получите незатухающий переходной процесс. По кривой переходного процесса измерьте параметры (амплитуду и период) автоколебаний и сравните с расчетом по формуле (1.4). Укажите на графике переходного процесса моменты переключения, а на фазовой плоскости – линию переключения реле.
· Выясните, как изменится вид переходного процесса и фазовой траектории при изменении вида статической характеристики – введите поочередно неоднозначность (параметр  , начальное значение
, начальное значение  ) и нечувствительность (начальное значение
) и нечувствительность (начальное значение  ) в нелинейный элемент.
) в нелинейный элемент.
| Рис. 1.2. S-модель исследуемой нелинейной САУ |
 а
а
|
 б
б
|
| Рис. 1.3. Внутренняя структура блоков подсистем модели: а – нелинейное звено (Nonlinear link) с возможностью задания и измерения типа нелинейной характеристики; б – линейная часть системы (Linear part) с возможностью коррекции (в соответствии с рис. 1.1.а и 1.1.б). |
2. Введите в схему с идеальным двухпозиционным реле коррекцию линейной части ЖОС. Установите:
· как изменился вид фазовой траектории и переходного процесса сравнительно со случаем без коррекции;
· как изменяются параметры переходного процесса в зависимости от глубины обратной связи;
· определите оптимальное (для обеспечения максимального быстродействия) значение параметра  .
.
По результатам исследования заполните табл. 1.1.
Табл. 1.1. Исследование коррекции ЖОС релейной следящей САУ.
| № п/п | Глубина обратной связи –
| Длительность процесса – 
| Динамический заброс –s |
3. Введите в схему с идеальным двухпозиционным реле корректирующую гибкую обратную связь. Установите:
· как изменился вид фазовой траектории и переходного процесса сравнительно со случаем без коррекции, при этом укажите на графиках переходного процесса и фазовой траектории участок скользящего режима;
· как изменяются параметры переходного процесса в зависимости от глубины обратной связи;
· определите оптимальное (для обеспечения максимального быстродействия) значение параметра  .
.
По результатам исследования заполните табл. 1.2.
Табл. 1.2. Исследование коррекции ГОС релейной следящей САУ.
| № п/п | Глубина обратной связи –
| Длительность процесса – , с
| Динамический заброс –s, % |
4. Исследуйте поочередно влияние эффектов нечувствительности и неоднозначности релейного элемента при коррекции системы ЖОС (для нечетных значений n) или при коррекции ГОС (для четных значений n). Выясните влияние ширины зон нечувствительности и неоднозначности на вид фазовых траекторий, точность системы и характеристики переходных процессов. На графиках переходных процессов. Увеличивая значение ширины зоны b (сравнительно с первоначальным заданным значением) выясните, как это влияет на характеристики переходных процессов, на точность системы и на вид фазовых траекторий.
Отчет должен включать в себя:
· структурные схемы исследуемой системы с необходимыми пояснениями;
· заполненные таблицы 1.1 и 1.2;
· выводы по каждому из пунктов задания, подкрепленные графиками переходных процессов и фазовых траекторий;
· отметки, на каждом из соответствующих графиков переходных процессов, моментов времени соответствующих переключению реле, а на графиках фазовых траекторий – положение линий переключения:
· вывод по типу устойчивости нелинейной системы в каждом случае;
· письменный ответ на вопросы, указанные преподавателем.
Контрольные вопросы
1. Что называется фазовой плоскостью САУ 2 порядка? В чем заключается исследование автоматических систем на фазовой плоскости?
2. Какие особенности поведения фазовых траекторий Вам известны?
3. Что такое особые точки, и какие виды особых точек Вам известны?
4. Сопоставьте фазовые траектории для фазовых портретов с различным видом особых точек и графики переходных процессов.
5. Как получить дифференциальное уравнение фазовой траектории? Какие методы приближенного и точного его решения Вам известны?
6. Опишите метод стабилизации релейной следящей системы демпфированием. Как изменяются фазовые траектории сравнительно со случаем исходной недемпфированной системы?
7. Опишите метод стабилизации релейной следящей системы коррекцией по скорости. В чем принципиальное отличие данного метода от метода стабилизации демпфированием?
8. Что такое скользящий режим, и при каких условиях он возникает? Каково уравнение движения системы в скользящем режиме?
9. Как выглядят линии переключения на фазовой плоскости для 3-х позиционного реле (для нелинейности типа насыщение)? Как они видоизменяются при использовании коррекции по скорости?
10. При каких условиях в рассматриваемой системе возникают фазовые траектории типа устойчивого граничного цикла?
Дата добавления: 2014-12-23; просмотров: 311; Мы поможем в написании вашей работы!; Нарушение авторских прав |