КАТЕГОРИИ:
АстрономияБиологияГеографияДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРиторикаСоциологияСпортСтроительствоТехнологияФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Метод синхронного детектирования
Предположим, что на вход объекта дополнительно к существующим сигналам (возмущения и управления) подан малое переменное возмущение  , среднее значение которого равно нулю –
, среднее значение которого равно нулю –  . Такое внешнее воздействие называется поисковым сигналом. Под действием его параметр оптимальности изменяется и принимает значение J(u1+δu(t)). Разлагая J(u1+δu(t)) в ряд Тейлора в окрестности точки u=u1 и, ограничиваясь квадратичным членом, получим:
. Такое внешнее воздействие называется поисковым сигналом. Под действием его параметр оптимальности изменяется и принимает значение J(u1+δu(t)). Разлагая J(u1+δu(t)) в ряд Тейлора в окрестности точки u=u1 и, ограничиваясь квадратичным членом, получим:

`
Вычислим значение функции процесса  , являющееся произведением двух сигналов –
, являющееся произведением двух сигналов –  и усредним его значение по интервалу времени T, величина которого существенно превышает период изменения поискового сигнала. Усреднение может быть выполнено автоматически путем подачи сигнала Z(t) на фильтр усреднения (например, апериодическое звено первого порядка).
и усредним его значение по интервалу времени T, величина которого существенно превышает период изменения поискового сигнала. Усреднение может быть выполнено автоматически путем подачи сигнала Z(t) на фильтр усреднения (например, апериодическое звено первого порядка).
Тогда, учитывая что  , получим:
, получим:
 . (7.1)
. (7.1)
В качестве поискового сигнала выберем гармонический процесс вида  . Для оценки усредненных слагаемых в (7.1) учтем, что:
. Для оценки усредненных слагаемых в (7.1) учтем, что:
 ,
,  ,
,  .
.
В результате получаем, что среднее значение функции процесса пропорционально искомой производной
 . (7.2)
. (7.2)
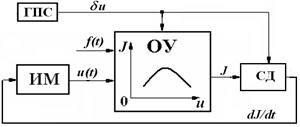
По окончании переходного процесса движения параметры рыскания зависят от характеристик поискового сигнала. Идея метода синхронного детектирования, и структурная схема модели экстремальной системы, использующей этот метод, представлены на рис. 7.1.
 а
а
|  б
б
|
| Рис. 7.1. Метод синхронного детектирования. а – реализация метода; б – структурная схема экстремальной системы. ГПС – генератор поискового сигнала, ОУ – экстремальный объект управления, ИМ – исполнительный механизм (обычно интегрирующее звено), СД – синхронный детектор, Ф – фильтр НЧ (усреднитель). |
Дата добавления: 2014-12-23; просмотров: 303; Мы поможем в написании вашей работы!; Нарушение авторских прав |