КАТЕГОРИИ:
АстрономияБиологияГеографияДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРиторикаСоциологияСпортСтроительствоТехнологияФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Простейшие движения твердого тела.
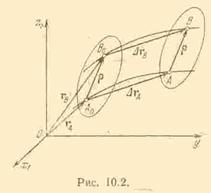
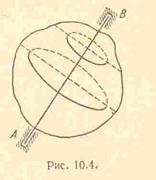
Поступательное движение твердого тела. Поступательным движением твердого тела называется такое движение, при котором любая прямая, проведенная в теле, остается все время движения параллельной своему первоначальному положению.
Пусть твердое тело движется поступательно относительно системы координат  ,
,  – радиус-вектор точки
– радиус-вектор точки  ,
,  – радиус-вектор точки
– радиус-вектор точки  , а
, а  – радиус-вектор, определяющий положение точки в подвижной системе координат
– радиус-вектор, определяющий положение точки в подвижной системе координат  , жестко связанной с телом.
, жестко связанной с телом.
Так как рассматриваемое тело абсолютно твердое и его движение поступательное, то вектор при движении тела не меняет модуля и направления.
Из рассмотрения рис. следует
 . (10.3)
. (10.3)
 Пусть в момент времени
Пусть в момент времени  тело занимало положение I, а в момент времени
тело занимало положение I, а в момент времени  – положение II. Тогда
– положение II. Тогда  будет вектором перемещения точки
будет вектором перемещения точки  , а вектор
, а вектор  – вектором перемещения точки за промежуток времени
– вектором перемещения точки за промежуток времени  .
.
Во время движения вектор не изменяется, значит, отрезки  и
и  равны и параллельны и, следовательно, фигура
равны и параллельны и, следовательно, фигура  – параллелограмм.
– параллелограмм.
Таким образом,
= ,
т.е. при поступательном движении абсолютно твердого тела перемещения всех его точек геометрически равны между собой.
Из равенства (10.3) и условия постоянства вектора также следует, что траектории точек тела, движущегося поступательно, одинаковы и получаются друг из друга параллельным смещением.
Продифференцировав выражение (10.3) по времени, получим
 ,
,
Но так как  , то
, то  и, следовательно,
и, следовательно,

или
 ,
,
т.е. при поступательном движении твердого тела скорости всех его точек в каждый момент времени равны между собой.
Дифференцируя полученное соотношение по времени, получим

или
 ,
,
т.е. ускорения всех точек тела в каждый момент времени равны между собой.
Таким образом, при поступательном движении твердого тела все его точки движутся одинаково, так как их перемещения, скорости и ускорения геометрически равны.
Следовательно, для определения движения твердого тела, движущегося поступательно, нет необходимости рассматривать движение всех точек тела, а достаточно рассмотреть движение одной точки тела, иначе говоря, поступательное движение твердого тела определяется движением одной точки этого тела, координаты которой должны быть заданы как функции времени.
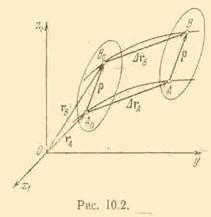
Пользуясь понятием поступательного движения, докажем теорему о сложении скоростей точки, совершающей сложное движение.
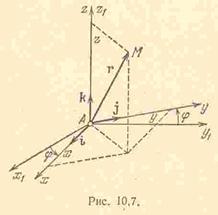
 Предположим, что точка
Предположим, что точка  движется по отношению к системе координат
движется по отношению к системе координат  , которая жестко связана с телом , перемещающимся поступательно по отношению к неподвижной системе координат
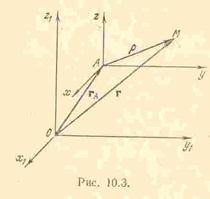
, которая жестко связана с телом , перемещающимся поступательно по отношению к неподвижной системе координат  . Положение точки относительно неподвижной системы координат определяется радиус-вектором
. Положение точки относительно неподвижной системы координат определяется радиус-вектором
 ,
,
где – радиус-вектор начала подвижной системы координат,  – радиус-вектор, определяющий положение точки в подвижной системе координат.
– радиус-вектор, определяющий положение точки в подвижной системе координат.
Дифференцируя это равенство по времени, получим
 .
.
В этом равенстве  есть скорость точки относительно неподвижной системы координат, которая называется абсолютной скоростью точки в сложном движении или абсолютной скоростью и обозначается через
есть скорость точки относительно неподвижной системы координат, которая называется абсолютной скоростью точки в сложном движении или абсолютной скоростью и обозначается через  .
.
Первое слагаемое в правой части равенства  – скорость точки . Так как система координат движется поступательно, то это одновременно будет скоростью той точки тела, с которой в данный момент совпадает движущаяся точка . Эта скорость называется переносной скоростью точки и обозначается
– скорость точки . Так как система координат движется поступательно, то это одновременно будет скоростью той точки тела, с которой в данный момент совпадает движущаяся точка . Эта скорость называется переносной скоростью точки и обозначается 
Выясним смысл производной  . Вектор определен в подвижной системе координат, следовательно,
. Вектор определен в подвижной системе координат, следовательно,
 ,
,
где  – координаты точки в системе координат , а
– координаты точки в системе координат , а  ,
,  ,
,  – единичные векторы этих осей.
– единичные векторы этих осей.
Так как подвижная система координат перемещается поступательно, то , , – постоянные векторы и их производные по времени равны нулю, поэтому
 .
.
Это равенство определяет скорость точки по отношению к подвижной системе координат и называется относительной скоростью точки . Обозначим эту скорость через  .
.
Таким образом, имеем
 . (10.4)
. (10.4)
 Полученное равенство выражает теорему о сложении скоростей: скорость точки в сложном движении равно сумме переносной и относительной скоростей.
Полученное равенство выражает теорему о сложении скоростей: скорость точки в сложном движении равно сумме переносной и относительной скоростей.
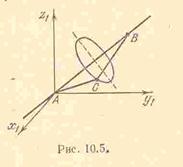 Вращение твердого тела вокруг неподвижной оси. При движении твердого тела с двумя неподвижными точками и все точки на прямой остаются неподвижными. Это следует из условия неизменяемости расстояний между точками твердого тела. Прямая называется осью вращения, а движение тела называется вращательным. Нетрудно видеть, что все точки тела описывают дуги окружностей с центрами в основаниях перпендикуляров, опущенных из этих точек на ось вращения.
Вращение твердого тела вокруг неподвижной оси. При движении твердого тела с двумя неподвижными точками и все точки на прямой остаются неподвижными. Это следует из условия неизменяемости расстояний между точками твердого тела. Прямая называется осью вращения, а движение тела называется вращательным. Нетрудно видеть, что все точки тела описывают дуги окружностей с центрами в основаниях перпендикуляров, опущенных из этих точек на ось вращения.
Возьмем на оси вращения две точки и и введем систему координат  с началом в точке . Так как положение точек и нам известно, то положение тела будет полностью определено, если мы будем знать в любой момент времени положение какой-либо точки
с началом в точке . Так как положение точек и нам известно, то положение тела будет полностью определено, если мы будем знать в любой момент времени положение какой-либо точки  тела (не лежащей на оси вращения). Из трех координат этой точки независимой будет только одна, так как расстояния
тела (не лежащей на оси вращения). Из трех координат этой точки независимой будет только одна, так как расстояния  и
и  постоянны и координаты точки связаны двумя уравнениями:
постоянны и координаты точки связаны двумя уравнениями:

Отсюда следует, что положение твердого тела, вращающегося вокруг неподвижной оси, определяется одним параметром.
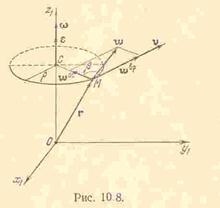
Направим ось  неподвижной системы координат по оси вращения тела. Введем подвижную систему координат , жестко связанную с телом, ось
неподвижной системы координат по оси вращения тела. Введем подвижную систему координат , жестко связанную с телом, ось  которой также направим по оси вращения. Положение тела будет полностью определено, если задан угол
которой также направим по оси вращения. Положение тела будет полностью определено, если задан угол  между неподвижной плоскостью
между неподвижной плоскостью  и подвижной плоскостью (жестко связанной с телом)
и подвижной плоскостью (жестко связанной с телом)  . Этот угол называется углом поворота тела.
. Этот угол называется углом поворота тела.
 Для однозначного определения положения тела необходимо знать не только величину, но и направление отсчета угла
Для однозначного определения положения тела необходимо знать не только величину, но и направление отсчета угла  . Условимся считать положительным направлением отсчета направление против хода часовой стрелки, если смотреть из конца оси .
. Условимся считать положительным направлением отсчета направление против хода часовой стрелки, если смотреть из конца оси .
Характер вращательного движения твердого тела целиком определяется заданием угла его поворота как функции времени. Главными кинематическими характеристиками вращательного движения тела в целом будут угловая скорость и угловое ускорение, к определению которых мы и перейдем.
Пусть в момент времени угол между неподвижной полуплоскостью и подвижной полуплоскостью равен  , а в момент времени равен
, а в момент времени равен  . Это значит, что за промежуток времени подвижная плоскость, а следовательно, и тело повернулись на угол
. Это значит, что за промежуток времени подвижная плоскость, а следовательно, и тело повернулись на угол
 .
.
Отношение угла поворота  , к промежутку времени , за который тело повернулось на этот угол, называется средней угловой скоростью тела за промежуток времени
, к промежутку времени , за который тело повернулось на этот угол, называется средней угловой скоростью тела за промежуток времени
 .
.
Предел этого отношения при  называется средней угловой скоростью тела в данный момент времени
называется средней угловой скоростью тела в данный момент времени
 . (10.5)
. (10.5)
Введенная таким образом угловая скорость  может быть как положительной, так и отрицательной в зависимости от закона изменения угла . Абсолютное значение угловой скорости будем обозначать через
может быть как положительной, так и отрицательной в зависимости от закона изменения угла . Абсолютное значение угловой скорости будем обозначать через  , т.е.
, т.е.  .
.
Если угол поворота измеряется в радианах, а время – в секундах, то единицей измерения угловой скорости будет  . В технике часто при равномерном вращении тела пользуются числом оборотов в минуту. Зависимость между угловой скоростью и числом оборотов в минуту определяется по следующей формуле:
. В технике часто при равномерном вращении тела пользуются числом оборотов в минуту. Зависимость между угловой скоростью и числом оборотов в минуту определяется по следующей формуле:
 1/сек,
1/сек,
где  – число оборотов в минуту.
– число оборотов в минуту.
Пусть теперь в момент времени угловая скорость вращения равна  , а в момент равна
, а в момент равна  ; тогда за промежуток времени приращение угловой скорости будет равно
; тогда за промежуток времени приращение угловой скорости будет равно
 .
.
Средним угловым ускорением тела за промежуток времени будем называть отношение приращения угловой скорости к промежутку времени, за который это изменение произошло, т.е.
 .
.
Предел этого отношения при называется угловым ускорением тела в данный момент времени
 , (10.6) так как
, (10.6) так как
 .
.
Угловое ускорение, характеризующее изменение угловой скорости с течением времени, равно производной по времени от угловой скорости или второй производной по времени от угла поворота.
Единица измерения углового ускорения –  .
.
Весьма полезным для дальнейшего изучения кинематики твердого тела является введение в рассмотрение вектора угловой скорости и вектора углового ускорения.
Вектором угловой скорости твердого тела, совершающего вращение вокруг неподвижной оси, мы будем называть вектор, модуль которого равен абсолютному значению производной угла поворота тела по времени, направленный вдоль оси вращения в ту сторону, откуда вращение тела видно происходящим против хода часовой стрелки.
Учитывая ранее введенное определение направления положительного отсчета угла , вектор угловой скорости можно определить по формуле
 , (10.7) где – единичный вектор оси
, (10.7) где – единичный вектор оси  .
.
Из этой формулы следует, что при  направление вектора
направление вектора  совпадает с направлением вектора , а при
совпадает с направлением вектора , а при  вектор направлен в сторону, противоположную направлению вектора .
вектор направлен в сторону, противоположную направлению вектора .
Вектором углового ускорения будем называть вектор, равный производной по времени от вектора угловой скорости, т.е.
 . (10.8) где
. (10.8) где  . Из формулы (10.8) следует, что вектор
. Из формулы (10.8) следует, что вектор  направлен, как и вектор вдоль оси вращения.
направлен, как и вектор вдоль оси вращения.
Величины  и
и  представляют проекции векторов угловой скорости и углового ускорения на ось вращения.
представляют проекции векторов угловой скорости и углового ускорения на ось вращения.
Перейдем к нахождению скорости и ускорения любой точки тела, вращающегося вокруг неподвижной оси. Пусть единичные векторы координатных осей соответственно будут , и . Радиус-вектор произвольной точки  можно представить в виде
можно представить в виде
 , (10.9) где – координаты точки (постоянные величины).
, (10.9) где – координаты точки (постоянные величины).
Скорость точки будет равна
 . (10.10) Так как вектор неподвижен, то
. (10.10) Так как вектор неподвижен, то  ; что же касается производных векторов и , то мы уже вычисляли их, рассматривая движение точки в полярной системе координат. Если обозначить
; что же касается производных векторов и , то мы уже вычисляли их, рассматривая движение точки в полярной системе координат. Если обозначить  и
и  , то формулы (9.15) и (9.16) примут вид
, то формулы (9.15) и (9.16) примут вид
 ,
,  .
.
Подставляя в формулу (10.10) эти производные и учитывая, что  , получим
, получим
 . (10.11) Отсюда следует, что проекции вектора скорости точки на оси
. (10.11) Отсюда следует, что проекции вектора скорости точки на оси  ,
,  и
и  соответственно равны
соответственно равны
 ,
,  ,
,  . (10.12)
. (10.12)
Так как векторное произведение
Имеет те же проекции на оси , и , что и вектор скорости  , то имеем
, то имеем
 , (10.13) иначе говоря, скорость любой точки твердого тела, вращающегося вокруг неподвижной оси, равна векторному произведению вектора угловой скорости тела на радиус-вектор этой точки.
, (10.13) иначе говоря, скорость любой точки твердого тела, вращающегося вокруг неподвижной оси, равна векторному произведению вектора угловой скорости тела на радиус-вектор этой точки.
Из формулы (10.13) следует, что
 ,
,
т.е. модуль скорости любой точки твердого тела равен произведению модуля угловой скорости тела на расстояние от точки до оси вращения. Направлен же вектор скорости по касательной к окружности, по которой перемещается точка , в сторону ее движения.
Взяв производную по времени от обеих частей равенства (10.13), получим
 .
.
Но  – угловое ускорение,
– угловое ускорение,  – скорость точки . Тогда
– скорость точки . Тогда
 .
.
Вектор  направлен по касательной к траектории точки (к окружности радиуса
направлен по касательной к траектории точки (к окружности радиуса  ), т.е. параллельно скорости (так как вектор
), т.е. параллельно скорости (так как вектор  направлен по оси вращения). Эта составляющая ускорения является касательным ускорением точки тела. В дальнейшем будем называть эту составляющую вращательным ускорением, т.е.
направлен по оси вращения). Эта составляющая ускорения является касательным ускорением точки тела. В дальнейшем будем называть эту составляющую вращательным ускорением, т.е.
 .
.
Это название связано с тем, что с такой составляющей ускорения мы встретимся при изучении более сложного движения тела, когда вектор уже не будет являться касательным ускорением точки .
Численное значение вращательного ускорения равно
 .
.
Вектор  направлен в плоскости окружности радиуса о точки к точке , т.е. направлен к оси вращения по нормали к траектории и является нормальным ускорением точки .
направлен в плоскости окружности радиуса о точки к точке , т.е. направлен к оси вращения по нормали к траектории и является нормальным ускорением точки .
Этот вектор
 ,
,
направленный к оси вращения, будем называть осестремительным ускорением.
Так как вектор перпендикулярен вектору  , то численное значение осестремительного ускорения равно
, то численное значение осестремительного ускорения равно
 .
.
Модуль полного ускорения точки будет
 .
.
Угол  , образованный векторами полного и осестремительного ускорений, определяется из формулы
, образованный векторами полного и осестремительного ускорений, определяется из формулы
 .
.
Задача 10.1.Стрелка гальванометра длиной  движется по закону
движется по закону  , где
, где  – угол максимального отклонения стрелки от положения
– угол максимального отклонения стрелки от положения  , а
, а  – период колебаний. Найти модуль и направление ускорения конца стрелки гальванометра в момент времени
– период колебаний. Найти модуль и направление ускорения конца стрелки гальванометра в момент времени  .
.
Решение.Угловая скорость и угловое ускорение соответственно равны
 ,
,  .
.
Модуль вращательного ускорения будет  ,
,
а модуль осестростремительного ускорения  .
.
При  ,
,  .
.
В момент угол  , т.е. стрелка доходит до своего крайнего положения. В этот момент времени скорость конца стрелки
, т.е. стрелка доходит до своего крайнего положения. В этот момент времени скорость конца стрелки  , а ускорение будет равно модулю вращательного ускорения.
, а ускорение будет равно модулю вращательного ускорения.
Глава XI
Дата добавления: 2015-04-15; просмотров: 376; Мы поможем в написании вашей работы!; Нарушение авторских прав |