КАТЕГОРИИ:
АстрономияБиологияГеографияДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРиторикаСоциологияСпортСтроительствоТехнологияФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Сложение вращений вокруг параллельных осей
Из содержания предыдущих параграфов видно, что введенные выше простейшие кинематические элементы — угловые скорости вращения тела (или системы координат) и скорости поступательных движений подчиняются тем же законам, что и силы и пары в статике. В самом деле, пары вращений или поступательные движения аналогичны парам сил. Как и в статике, совокупность кинематических пар эквивалентна паре, момент которой (или скорость результирующего поступательного движения) равен сумме моментов слагаемых пар.
 Угловые скорости вращения вокруг осей, пересекающихся в одной точке, заменяются одной угловой скоростью так же, как и сходящаяся система сил в статике приводится к одной силе (равнодействующей). Аналогия между угловыми скоростями составляющих вращений и силами этим не ограничивается. Мы сейчас установим, что сложение вращений вокруг параллельных осей совершенно аналогично сложению параллельных сил.
Угловые скорости вращения вокруг осей, пересекающихся в одной точке, заменяются одной угловой скоростью так же, как и сходящаяся система сил в статике приводится к одной силе (равнодействующей). Аналогия между угловыми скоростями составляющих вращений и силами этим не ограничивается. Мы сейчас установим, что сложение вращений вокруг параллельных осей совершенно аналогично сложению параллельных сил.
Предположим, что тело вращается с угловой скоростью ω2 вокруг оси O2z2относительно системы координат O2x2y2z2, а последняя вращается с угловой скоростью ω1 вокруг оси O1z1 относительно системы координат O1x1y1z1, причем оси O1z1и O2z2 параллельны (рис. 14.7).
Тогда абсолютная скорость любой точки М тела

Скорости vr и ve точки М расположены в плоскости, перпендикулярной осям O1z1и O2z2, следовательно, и абсолютная скорость v точки М лежит в плоскости, перпендикулярной этим осям. Так как точка М произвольна, то это означает, что тело участвует в плоском движении. Найдем в плоскости x1O1y1мгновенный центр скоростей в случае, когда ω1и ω2 направлены в одну сторону (рис. 14.7, а).
Для точки Р, лежащей на прямой O1O2, vrи vе коллинеарны, но направлены в разные стороны. Для того чтобы их геометрическая сумма была равна нулю, должно выполняться равенство

или
 (14.11)
(14.11)
Точка Р делит отрезок O1O2 внутренним образом на части, обратно пропорциональные модулям угловых скоростей составляющих вращений.
Перейдем теперь к сложению вращений, имеющих противоположные направления. Пусть  Скорости vr и vе в этом мой O1O2, расположенных вне отрезка O1O2 (рис. 14.7, б). Найдем точку Р, в которой эти скорости равны:
Скорости vr и vе в этом мой O1O2, расположенных вне отрезка O1O2 (рис. 14.7, б). Найдем точку Р, в которой эти скорости равны:

или
 (14.12)
(14.12)
Точка Р делит отрезок O1O2 внешним образом на части, обратно пропорциональные модулям угловых скоростей. Такую точку всегда можно найти, если только 
В каждом из рассмотренных случаев точка Р имеет скорость, равную нулю, т.е.
 (14.13)
(14.13)
Найдем теперь скорость произвольной точки М:

Здесь r' — радиус-вектор точки М относительно мгновенного центра скоростей Р. Раскрывая скобки в правой части и используя равенство (14.13), получим
 (14.14)
(14.14)
где 
Отсюда следует, что совокупность двух вращений, происходящих вокруг параллельных осей, но не представляющих собой пары вращений, приводится к одному вращению, мгновенная ось которого делит внутренним или внешним образом расстояние между осями составляющих вращений на части, обратно пропорциональные модулям угловых скоростей. Угловая скорость результирующего вращения равна геометрической сумме угловых скоростей составляющих движений.
Если угловые скорости направлены в одну сторону, то мгновенная ось вращения расположена между, осями О1z1и О2z2 и модуль результирующей угловой скорости  В случае противоположно направленных вращений мгновенная ось расположена за осью, вокруг которой вращение происходит с большей угловой скоростью и
В случае противоположно направленных вращений мгновенная ось расположена за осью, вокруг которой вращение происходит с большей угловой скоростью и  Результирующая угловая скорость направлена в сторону большей из угловых скоростей.
Результирующая угловая скорость направлена в сторону большей из угловых скоростей.
Задачи
Задача 14.3. В редукторе (рис. 14.8) водило ОС делает n=720 об/мин, а подвижные шестерни 2 и 3 вращаются вокруг своей оси относительно поводка в том же направлении с угловой скоростью, соответствующей n23 = 240 об/мин. Определить радиус r1 неподвижного колеса 1 и число оборотов вала II, если ОС = 240 мм, r4 = 40 мм (r4 —радиус шестерни 4).
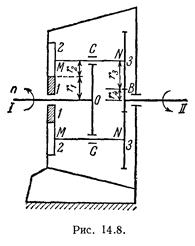 Подвижные шестерни 2 и 3 совершают сложное движение. Они вращаются вокруг оси MN относительно поводка и вместе с этой осью вокруг оси вала.
Подвижные шестерни 2 и 3 совершают сложное движение. Они вращаются вокруг оси MN относительно поводка и вместе с этой осью вокруг оси вала.
Радиус r1 неподвижного колеса 1 найдем из условия, что мгновенная ось абсолютного вращения шестерен 2 и 3, параллельная оси MN, проходит через точку касания неподвижного колеса 1 и подвижной шестерни 2. На основании соотношения (14.11) можем записать:
где ω23—угловая скорость шестерен 2 и 3 при их вращении вокруг оси MN, а ω — угловая скорость вала I.
Между угловой скоростью и числом оборотов в минуту существует зависимость вида

следовательно,

Абсолютная угловая скорость ωа шестерен 2 и 3 при вращении вокруг мгновенной оси на основании (14.14) равна
ωa= ω+ ω23
Характеризуя угловую скорость числом оборотов, получим
na= n + n23 = 720 + 240 = 960 об/мин.
Для определения числа оборотов шестерни 4, а следовательно, и вала II, воспользуемся тем обстоятельством, что абсолютные скорости точек шестерен 3 и 4 в точке В их зацепления равны между собой (нет относительного проскальзывания):
 Таким образом,
Таким образом,

Задача 14.4. Сколько оборотов в минуту должен делать ведущий вал I редуктора (рис. 14.9), чтобы ведомый вал II совершал n4=1800 об/мин?
Первое колесо с внутренними зубьями неподвижно. Дано: r1=150 мм, r2 = 30 мм, r4 = 50 мм.
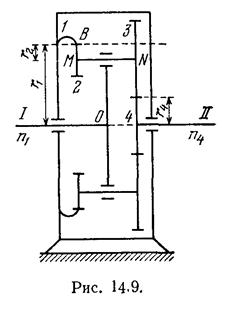 Подвижные шестерни 2 и 3 как одно целое совершают сложное движение. Они вращаются вокруг оси MN относительно поводка и вместе с ней вращаются вокруг оси I.
Подвижные шестерни 2 и 3 как одно целое совершают сложное движение. Они вращаются вокруг оси MN относительно поводка и вместе с ней вращаются вокруг оси I.
Мгновенная ось абсолютного вращения этих шестерен проходит через точку В — точку зацепления подвижной шестерни 2 и неподвижной шестерни I. Эта ось параллельна оси MN. Так как мгновенная ось абсолютного вращения шестерен 2 и 3 лежит вне осей слагаемых движений, то вращение этих шестерен вокруг оси MN происходит в сторону, противоположную направлению вращения вала I.
На основании формул (14.12) и (14.14) имеем

и
ωa= ω23 – ω1
где (ω23— угловая скорость вращения шестерен 2 и 3 вокруг оси MN, (ωa—абсолютная угловая скорость этих шестерен.
Из полученных соотношений следует
Скорости точек зацепления шестерен 3 и 4 равны, т. е. ωa (r1 — r4) = ω4r4 Отсюда следует:
или

Вал II вращается в ту же сторону, что и вал I.
Дата добавления: 2015-04-15; просмотров: 321; Мы поможем в написании вашей работы!; Нарушение авторских прав |