КАТЕГОРИИ:
АстрономияБиологияГеографияДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРиторикаСоциологияСпортСтроительствоТехнологияФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Анализ работы нелинейных систем по методу А.А.Вавилова
Условие баланса амплитуд и фаз, записанные в логарифмической форме:
 (5.84)
(5.84)
позволяют просто и наглядно графически определить частоту и амплитуду автоколебаний в системе, а также их устойчивость.
Пример 5.12.
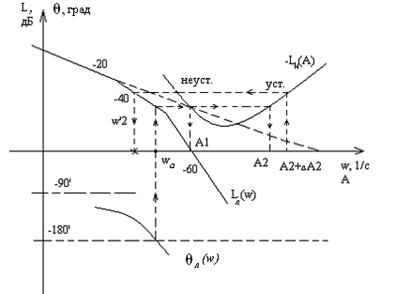 Рис. 5.42. ЛЧХ линейной
Рис. 5.42. ЛЧХ линейной
части системы и 
Условия гармонического баланса могут выполняться лишь в зоне частот, где  >0 и
>0 и  =
=  (рис. 5.42).
(рис. 5.42).
При  (
(  - частота предполагаемых автоколебаний)
- частота предполагаемых автоколебаний)  =
=  при двух значениях А:
при двух значениях А:  и
и  .Режим автоколебаний ( , ) – неустойчивый, режим ( , ) – устойчивый.
.Режим автоколебаний ( , ) – неустойчивый, режим ( , ) – устойчивый.
При исследовании устойчивости периодических решений по ЛЧХ следует пользоваться критерием Найквиста. Если под действием возмущения амплитуда колебаний режима ( , ) увеличилась на величину  , то, приняв в качестве частоты среза
, то, приняв в качестве частоты среза  , определяем, что система устойчива, иначе неустойчива
, определяем, что система устойчива, иначе неустойчива  автоколебания рассматриваемого режима устойчивые.
автоколебания рассматриваемого режима устойчивые.
При определённых условиях влияние высших гармоник на входе нелинейных элементов и малых параметров, обусловленных погрешностями идентификации нелинейных элементов и линейной части и малыми вариациями параметров системы в процессе эксплуатации, может приводить к существенному изменению амплитуды и частоты периодических решений.
Наличие звеньев с существенными нелинейностями в САУ, не предусмотренных структурой, может вызвать ухудшение качества управления, а в ряде случаев делает управление невозможным. Это проявляется в росте погрешности управления, увеличении времени  , колебательности переходного процесса, потере системой устойчивости в большом, возможности возникновения автоколебательных режимов.
, колебательности переходного процесса, потере системой устойчивости в большом, возможности возникновения автоколебательных режимов.
Способы уменьшения влияния нелинейных элементов:
- Улучшение конструкции функциональных элементов;
- Изменение линейной части (изменение параметров и структуры линейной части; введение дополнительных линейных обратных связей-охват нелинейных элементов линейной обратной связью);
- Компенсация влияния нелинейностей (применение специальных компенсирующих нелинейных элементов, обеспечивающих линеаризацию системы; введение дополнительных сигналов управления по отклонению);
- Вибрационная линеаризация нелинейностей.
Дата добавления: 2015-01-29; просмотров: 411; Мы поможем в написании вашей работы!; Нарушение авторских прав |