КАТЕГОРИИ:
АстрономияБиологияГеографияДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРиторикаСоциологияСпортСтроительствоТехнологияФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Имитационное моделирование нелинейных систем
1. Исследование нелинейных систем методом гармонического баланса (методом описывающей функции).
Условия применения метода:
1. Расчетная модель нелинейной системы имеет только одну нелинейность;
2. Выполняется гипотеза фильтра – линейная часть системы является фильтром низких частот;
3. Система автономна, т.е. стационарна и свободна (входной сигнал системы равен нулю).
1.1. Исследование нелинейной САУ, содержащей идеальное реле (компаратор).
Структурная схема системы приведена на рис. 5.53.

Рис. 5.53. Структурная схема САУ, содержащей идеальное реле
Примем V = 1.
1.1.1. Анализ работы нелинейной системы по методу Л. С. Гольдфарба.
По  этому методу условие гармонического баланса выражено уравнением
этому методу условие гармонического баланса выражено уравнением
Л. С. Гольдфарба
 , (5.91)
, (5.91)
где Wн(A) – эквивалентный комплексный передаточный коэффициент НЭ (описывающая функция),
 . (5.92)
. (5.92)
1.1.1.1. Построим в MATLAB амплитудно-фазовую характеристику линейной части системы и график функции
 , (5.93)
, (5.93)
так как описывающая функция идеального реле
 . (5.94)
. (5.94)
Скрипт MATLAB:
% Исследование нелинейной системы по методу Л.С.Гольдфарба
% График АФХ линейной части нелинейной системы
num=[4];den=[1 2 1 0];
sys=tf(num,den);
nyquist(sys)
MATLAB возвращает график, приведенный на рис. 5.54.

Рис. 5.54. График АФХ линейной части нелинейной системы
1.1.1.2. Определим точку пересечения графиков (в ней выполняется условие гармонического баланса) и рассчитаем частоту, период и амплитуду автоколебаний в системе.
% Расчёт амплитуды и периода автоколебаний
V=1; w=1.01;
d=-1.97;
A=-4*V*d/pi
T=2*pi/w
>>
A =
2.5083
T =
6.2210
Таким образом, в системе возникают автоколебания с параметрами: ω=1.01 с-1, A=2.508, Т= 6.2210 с.
1.1.2. Анализ работы нелинейной САУ по методу А.А. Вавилова.
Условия баланса амплитуд и фаз, записанные в логарифмической форме, имеют вид
 LЛ(ω) = - LH(A);
LЛ(ω) = - LH(A);
ΘЛ(ω) + ΘН(А) =  (2k+1)π, k=0,1,2,… . (5.95)
(2k+1)π, k=0,1,2,… . (5.95)
1.1.2.1. Построим в MATLAB функции: ΘЛ(ω) =-π/2-2*arctg(ω), ΘН(А) =0,
 и
и  (5.96)
(5.96)
Скрипт MATLAB:
% Исследование нелинейной системы по методу А.А.Вавилова
% Графики ЛЧХ линейной части нелинейной системы; для получения графика –Lн(А)
% строим модель sys1, где ω=А
num=[4];den=[1 2 1 0];
sys=tf(num,den);
V=1;
num1=[-pi/(4*V) 0]; den1=[1];
sys1=tf(num1,den1);
bode(sys,sys1)
MATLAB возвращает графики, приведенные на рис. 5.55.

Рис. 5.55. Графики ЛЧХ линейной части НС и 
1.1.2.2. Определяем частоту, амплитуду и период предполагаемых автоколебаний по графику:
ΘЛ(ω) + ΘН(А) = - π ( здесь k = 0)  ω=1.01 c-1, А=2.5, Т=6.2210 с.
ω=1.01 c-1, А=2.5, Т=6.2210 с.
1.1.3. Аналитическое описание объекта управления в пространстве состояния.
Составим векторно-матричную форму уравнения состояния по передаточной функции объекта:
 (5.97)
(5.97)
Скрипт MATLAB:
% Определение параметров матриц уравнения состояния объекта
% по его передаточной функции
num=[4];den=[1 2 1 0];
sys_tf=tf(num,den)
sys_ss=ss(sys)
Результаты расчёта система выводит в «Окно команд»:
>>
Transfer function:
---------------
s^3 + 2 s^2 + s
a =
x1 x2 x3
x1 -2 -0.5 0
x2 2 0 0
x3 0 1 0
b =
u1
x1 1
x2 0
x3 0
c =
x1 x2 x3
y1 0 0 2
d =
u1
y1 0
Continuous-time model.
>>
1.1.4. Исследование модели системы в Simulink по рис. 5.56.
Производим набор модели системы в Simulink по рис. 5.56.

.Рис. 5.56. Модель системы в Simulink
Вводим параметры матриц, полученные в пункте 1.1.3 и, задав начальные условия
[0;0;1.5], запускаем модель; в окне Scope по графику y(t) (рис. 5.57)

Рис. 5.57. График выходной функции системы
определяем параметры устойчивых автоколебаний: ω=0,97 c-1, А=2.6, Т=6.5 с.
Результаты исследования моделей системы различными методами идентичны.
1.2. Исследование нелинейной системы автоматического управления, содержащей нелинейность типа “люфт”.
1.2.1. Структурная схема САУ с люфтом приведена на рис. 5.58.

Рис. 5.58. Структурная схема САУ с люфтом
Необходимые условия применимости метода гармонического баланса в нелинейной системе при r(t) = 0 выполняются.
1.2.2. Проведём анализ работы нелинейной системы по методу Л. С. Гольдфарба.
Нелинейность типа “люфт” вносит отставание по фазе.
Описывающая функция для “люфта” имеет вид
 A > C ; (5.98)
A > C ; (5.98)
 (5.99)
(5.99)
Численные значения частотной передаточной функции
 (5.100)
(5.100)
и функции -1/  приведены в таблице 5.2.
приведены в таблице 5.2.
Таблица 5.2
Численные значения  и
и 
| A | -1/
| 
| ω |
¥ 
| — | — | |
| 1,11 | 
| 
| 0,3 |
| 1,25 | 
| 
| 0,41 |
| 1,67 | 
| 
| 0,65 |
| 2,50 | 
| 
| 0,86 |
| 3,75 | 
| 
| |

| 
| 1,12 | |

| 
| 1,27 |
По табличным данным выявлены режимы автоколебаний, их параметры и устойчивость:
y1(t)=1.25sin0.41t – неустойчивые автоколебания, y2(t)=3.75sint – устойчивые автоколебания.
1.2.3. Проведём исследование нелинейной системы в MATLAB.
1.2.3.1. Определим параметры матриц уравнения состояния объекта управления.
Скрипт MATLAB:
% Определение параметров матриц ОУ
num=[4];den=[1 3 2 0];
sys_tf=tf(num,den)
sys_ss=ss(sys_tf)
Результат расчёта:
>>
Transfer function:
-----------------
s^3 + 3 s^2 + 2 s
a =
x1 x2 x3
x1 -3 -0.5 0
x2 4 0 0
x3 0 8 0
b =
u1
x1 0.25
x2 0
x3 0
c =
x1 x2 x3
y1 0 0 0.5
d =
u1
y1 0
Continuous-time model.
>>
Производим набор схемы моделирования системы с люфтом в Simulink (рис. 5.59).
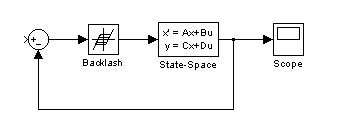
Рис. 5.59. Схема модели системы с люфтом в Simulink
Вводим в модель параметры элементов и начальные условия [0;0;10]. Результат моделирования в окне Scope имеет вид, приведенный на рис. 5.60.

Рис. 5.60. Реакция модели нелинейной системы на начальные условия [0;0;10]
При вводе в модель начальных условий [0;0;6] переходный процесс имеет форму расходящихся колебаний до установившегося режима в виде автоколебаний (рис. 5.61).

Рис. 5.61. Реакция модели нелинейной системы на начальные условия [0;0;6]
Модель иллюстрирует наличие устойчивого предельного цикла y(t)=3.52sin1.01t.
2. Исследование нелинейных САУ методом фазовых траекторий.
2.1. Математическое описание системы стабилизации положения спутника приведено в примере 5.15.
Методика анализа нелинейной системы (рис. 5.51) заключается в построении множества фазовых траекторий движения системы в пространстве состояний с двумя координатами x1 и x2. Фазовый портрет содержит исчерпывающую информацию о поведении системы при различных начальных условиях.
Определим матрицы уравнения состояния спутника по скрипту MATLAB:
% Определение параметров матриц уравнения состояния спутника
num=[1];den=[1 0 0];
sys_tf=tf(num,den)
sys_ss=ss(sys_tf)
>>
Transfer function:
---
s^2
a =
x1 x2
x1 0 0
x2 1 0
b =
u1
x1 1
x2 0
c =
x1 x2
y1 0 1
d =
u1
y1 0
Continuous-time model.
>>
2.2. Построим модель системы в Simulink и введём в модуль объекта рассчитанные параметры матриц и начальные условия (рис. 5.62).

Рис. 5.62. Модель системы стабилизации спутника в Simulink
При моменте инерции спутника J=150 кгм2 примем u=mвр/J = 0.12 Н/кгм и начальные условия [0.2;-0.05].
2.3. Исследование модели системы по фазовым траекториям при величине передаточного коэффициента датчика скорости равном нулю иллюстрируется графиком, приведенным
на рис. 5.63.

Рис. 5.63. График фазовой траектории системы при kдс=0
Если величина передаточного коэффициента датчика скорости kдс=0.278, система работает устойчиво без скользящего режима (рис. 5.64).

Рис. 5.64. График фазовой траектории системы при kдс=0.278
Скользящий режим работы системы наблюдается при kдс  1.
1.
Если наклон линии переключения является малым, то по мере приближения траектории к началу координат она всегда стремится пересечь линию переключения независимо от того, по какую сторону от нее находится. Это приводит к тому, что фазовая траектория скользит вдоль линии переключения к началу координат.
График фазовой траектории при kдс=1.01 приведен в окне осциллографа «XY Graph»
(рис. 5.65).
 .
.
Рис. 5.65. График фазовой траектории системы при kдс= 1,01
ЛИТЕРАТУРА
1. Арнольд В.И. Теория катастроф.-М.: Наука, 1990.
- Бесекерский В.А., Попов Е.П. Теория систем автоматического управления. СПб, Изд-во “Профессия”, 2003.
3. Дьяконов В.П. MATLAB 6/6.1/6.5+Simulink 4/5 в математике и моделировании.- М.:
СОЛОН-Пресс, 2003.
3. Пантелеев А.В., Бортаковский А.С. Теория управления в примерах и задачах: Учеб.
пособие.-М.: Высшая школа, 2003.
5. Ротач В.Я. Теория автоматического управления: Учебник для вузов.- 2-е изд., перераб. и доп.- М.: Издательство МЭИ, 2004.
6. Теория автоматического управления: Учеб. для вузов/ С.Е. Душин, Н.С. Зотов,
Д.Х. Имаев и др.; Под ред. В.Б. Яковлева.-М.: Высшая школа, 2003.
7. Топчеев Ю.И. Атлас для проектирования систем автоматического регулирования: Учеб. пособие для втузов.-М.: Машиностроение, 1989.
8.Филлипс Ч., Харбор Р. Системы управления с обратной связью.- М.: Лаборатория Базовых Знаний, 2001.
Дата добавления: 2015-01-29; просмотров: 501; Мы поможем в написании вашей работы!; Нарушение авторских прав |